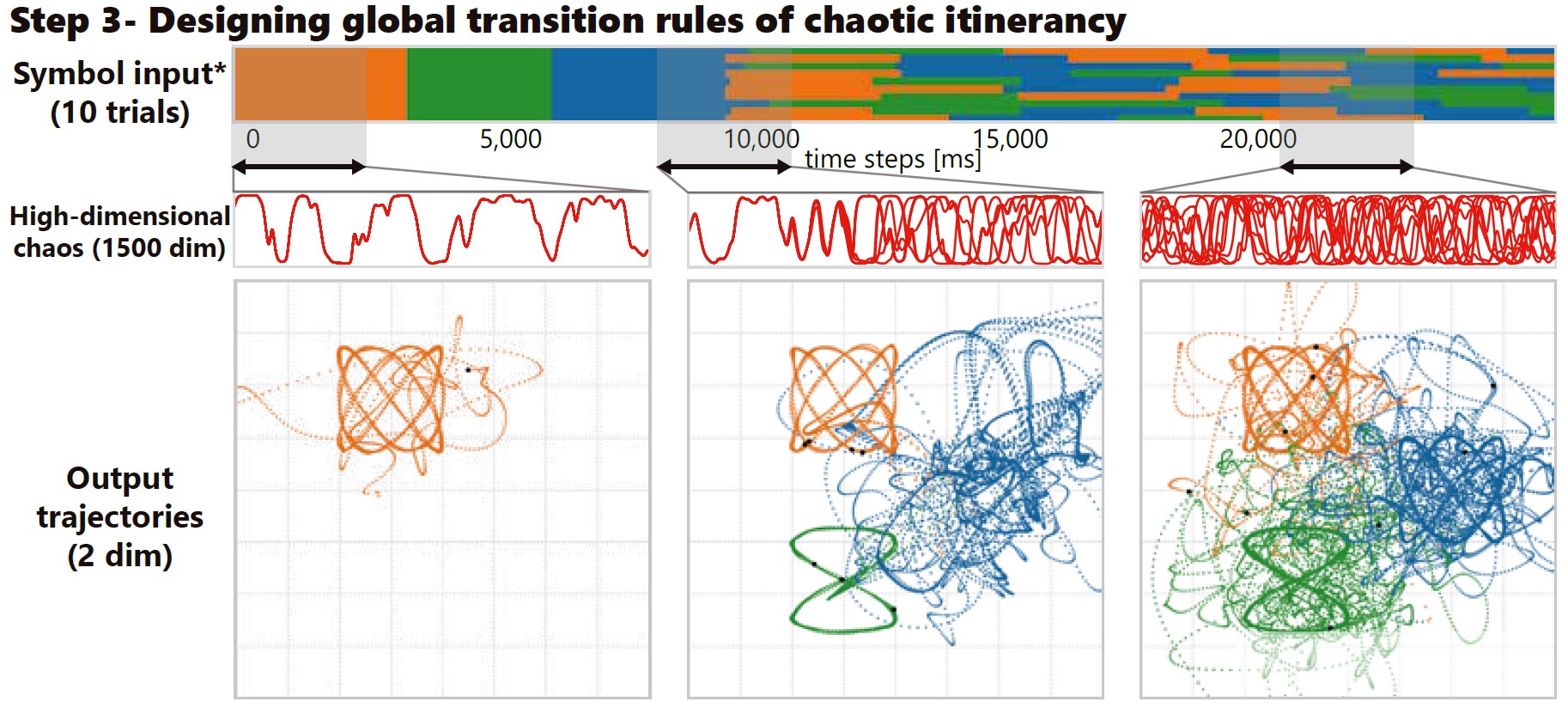
These visualizations of the system’s output show broad patterns of instability, but localized patterns of stability. Credit: © 2020 Inoue et al.
Researchers use dynamical systems and machine learning to add spontaneity to AI.
Autonomous functions for robots, such as spontaneity, are highly sought after. Many control mechanisms for autonomous robots are inspired by the functions of animals, including humans. Roboticists often design robot behaviors using predefined modules and control methodologies, which makes them task-specific, limiting their flexibility. Researchers offer an alternative machine learning-based method for designing spontaneous behaviors by capitalizing on complex temporal patterns, like neural activities of animal brains. They hope to see their design implemented in robotic platforms to improve their autonomous capabilities.
Robots and their control software can be classified as a dynamical system, a mathematical model that describes the ever-changing internal states of something. There is a class of dynamical system called high-dimensional chaos, which has attracted many researchers as it is a powerful way to model animal brains. However, it is generally hard to gain control over high-dimensional chaos owing to the complexity of the system parameters and its sensitivity to varying initial conditions, a phenomenon popularized by the term “butterfly effect.” Researchers from the Intelligent Systems and Informatics Laboratory and the Next Generation Artificial Intelligence Research Center at the University of Tokyo explore novel ways for exploiting the dynamics of high-dimensional chaos to implement human-like cognitive functions.
“There is an aspect of high-dimensional chaos called chaotic itinerancy (CI) which can explain brain activity during memory recall and association,” said doctoral student Katsuma Inoue. “In robotics, CI has been a key tool for implementing spontaneous behavioral patterns. In this study, we propose a recipe for implementing CI in a simple and systematic fashion only using complicated time-series patterns generated by high-dimensional chaos. We felt our approach holds potential for more robust and versatile applications when it comes to designing cognitive architectures. It allows us to design spontaneous behaviors without any predefined explicit structures in the controller, which would otherwise serve as a hindrance.”
Reservoir computing (RC) is a machine learning technique that builds on dynamical systems theory and provides the basis of the team’s approach. RC is used to control a type of neural network called a recurrent neural network (RNN). Unlike other machine learning approaches that tune all neural connections within a neural network, RC only tweaks some parameters while keeping all other connections of an RNN fixed, which makes it possible to train the system faster. When the researchers applied principles of RC to a chaotic RNN, it exhibited the kind of spontaneous behavioral patterns they were hoping for. For some time, this has proven a challenging task in the field of robotics and artificial intelligence. Furthermore, the training for the network takes place prior to execution and in a short amount of time.
“Animal brains yield high-dimensional chaos in their activities, but how and why they utilize chaos remains unexplained. Our proposed model could offer insight into how chaos contributes to information processing in our brains,” said Associate Professor Kohei Nakajima. “Also, our recipe would have a broader impact outside the field of neuroscience since it can potentially be applied to other chaotic systems too. For example, next-generation neuromorphic devices inspired by biological neurons potentially exhibit high-dimensional chaos and would be excellent candidates for implementing our recipe. I hope we will see artificial implementations of brain functions before too long.”
Reference: “Designing spontaneous behavioral switching via chaotic itinerancy” by Katsuma Inoue, Kohei Nakajima and Yasuo Kuniyoshi, 11 November 2020, Science Advances.
DOI: 10.1126/sciadv.abb3989
Funding: This work was based on results obtained from a project commissioned by the New Energy and Industrial Technology Development Organization (NEDO). K.I. was supported by JSPS KAKENHI (grant number JP20J12815). K.N. was supported by JSPS KAKENHI (grant number JP18H05472) and by MEXT Quantum Leap Flagship Program (MEXT Q-LEAP) (grant number JPMXS0120319794). This work was supported by NEDO [serial numbers 15101156-0 (dated 24 June 2016) and 18101806-0 (dated 5 September 2018)] and Chair for Frontier AI Education, School of Information Science and Technology and Next Generation AI Research Center [serial number not applicable (dated 1 June 2016)].






This is great progress towards AI Assassin’s/Mercenaries/Soldiers. The AI could follow rules set in place for it. Now they can be spontaneous almost at will? Apply this to convert-ops, and when a mission goes south “Spontaneous mode activated. Bravo 6 going dark”.
I’m not sure I like the sound of this. We really do need to be able to control our electronics as much as possible, not allow them to start doing whatever they want. How much truth this article contains is another question.
good article
… “Spontaneous” like xn+1 = r*xn*(1-xn) … that is like chaotic at the times, non chaotic at the times when one plots it with the respect to r…