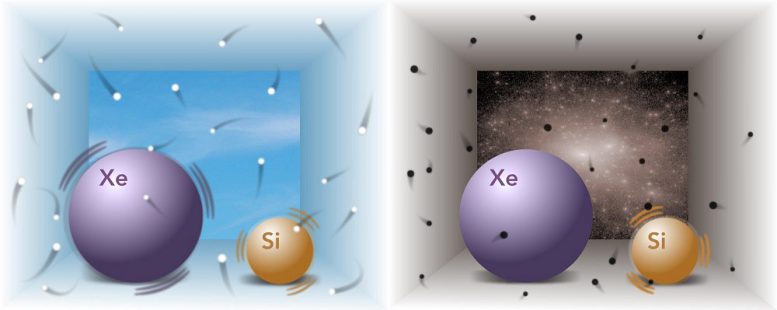
Left panel: Air molecules whiz around at a variety of speeds, and some are very fast. When they collide with both heavy and light elements – for example, xenon (purple) and silicon (orange) – these fast moving particles have enough momentum to affect both nuclei. Right panel: Dark matter particles are moving more slowly and are less able to affect the heavy xenon nucleus. As a result, detectors made from lighter materials like silicon may prove to be more effective at picking up signals of dark matter. Credit: Greg Stewart/SLAC National Accelerator Laboratory
Theoretical physicists from the Kavli Institute for Particle Astrophysics and Cosmology detail a new mathematical description of how dark matter particles behave, which could help narrow the search for them.
Now that it looks like the hunt for the Higgs boson is over, particles of dark matter are at the top of the physics “Most Wanted” list. Dozens of experiments have been searching for them, but often come up with contradictory results.
Theorists from the Kavli Institute for Particle Astrophysics and Cosmology (KIPAC), a joint SLAC-Stanford institute, believe they’ve come up with an algorithm – a mathematical description of how the individual particles behave – that could help narrow the search for these elusive particles, which are thought to make up more than 25 percent of the matter and energy in the universe.
It starts with assumptions, said Yao-Yuan Mao, lead author of a paper published in The Astrophysical Journal that outlines their new search tool. Assumptions are a good starting point when you don’t know where to look. A popular assumption about dark matter is that it’s made up of WIMPs, Weakly Interacting Massive Particles. The “M” in WIMP accounts for gravity’s ability to herd these particles around; the “P” and “I” hint at why they’re so hard to detect otherwise.
Most dark matter detectors are based on the assumption that, every once in a while, a WIMP must smack into the nucleus of an atom of visible matter, making the nucleus vibrate and releasing a signal. Such disruptions can be detected. But what that disruption looks like and how often it happens depends on yet more assumptions. How heavy is the dark matter particle? How fast is it moving?
Another common assumption that touches on these issues, said Mao, is that collections of WIMPs behave as an ideal gas, a collection of particles that hang out together and occasionally bounce off each other. Sometimes a lucky bounce gives a particle more energy, sending it zooming off at a greater speed. How often particles pick up more energy and more speed depends on how much you turn up the heat or put on the pressure.
But, as far as scientists can tell, turning up the heat and putting on the pressure doesn’t affect WIMPs. Only gravity does.
“The Ideal Gas Law doesn’t describe a system of particles, like dark matter particles, that don’t seem to transfer energy to each other,” said Mao. This incorrect description can distort the carefully built picture upon which a search for WIMPs is based. In particular, it means predictions of their velocities can be off by a significant amount, but velocities affect what a detector will see.
Mao and his colleagues have used simulations to provide new insight into how fast WIMPs are expected to move.
WIMPs that move fast enough to reach escape velocity and leave the dark matter halo that surrounds the Milky Way take themselves completely out of the hunt. That reduction in the number of WIMPs affects how often one hits the nucleus of an atom in a detector. The remaining WIMPs must be moving more slowly than escape velocity, which affects how hard they can hit. If they hit a detector whose atoms are too massive, the WIMPs bounce off without a sign, like pebbles scattering off a boulder. So the trick is to build a detector out of materials that are a good match for the particle’s expected mass and speed.
As theorist Louis Strigari, another author on the paper, said, “The heavier the WIMP, the more collisions you can detect.” But there’s a growing suspicion that WIMPs might be as much as 10 times lighter than previously thought. “If WIMPs do have this low mass,” said Strigari, “the model used to describe their behavior would have significant effects on an experiment’s result.”
In fact, Mao, Strigari and Risa Wechsler, a professor at SLAC and Stanford, are now busy interpreting the results of experiments based on their new description, and they believe it explains some of the conflicting results obtained by such experiments as XENON100 (which uses the fairly heavy element xenon as the material for dark matter to smack into) and the Cryogenic Dark Matter Search II, or CDMS II (which took its readings with detectors made from the much lighter element silicon).
KIPAC member Blas Cabrera is a Stanford physics professor and, as a leader of CDMS II, a dark matter hunter from the experimental side. He said the theorists have made an important contribution. “It really emphasizes that, for light-mass WIMPs, different types of detectors would have different responses,” he said.
“I’m actually hoping we can talk the experimental community into using their model,” Cabrera added. “It’s important to get everyone to agree to use the same parameters so we’re comparing apples to apples instead of apples to oranges.”
Reference: “Halo-to-Halo Similarity and Scatter in the Velocity Distribution of Dark Matter” by Yao-Yuan Mao, Louis E. Strigari, Risa H. Wechsler, Hao-Yi Wu and Oliver Hahn, 23 January 2013, The Astrophysical Journal.
DOI: 10.1088/0004-637X/764/1/35





his issue and tired to tinker around to check if its pos https://vidmate.onl/ sible but couldnt get it done. Now that i have seen the way you did it, thanks guys
with
regards