Harvard researchers found that adding a little randomness to robot movements can prevent gridlock and dramatically boost efficiency in crowded swarms.
Imagine a swarm of robots sent into a tight space to handle an urgent job, such as cleaning up an oil spill or assembling complex equipment. At first, adding more robots speeds things up. But beyond a certain point, the space becomes crowded, robots interfere with one another, and progress slows to a crawl.
This raises a deceptively simple question: in a limited area, how many robots are actually optimal? Researchers at Harvard believe they have found a compelling answer.
Finding the Balance Between Order and Chaos
A team led by L. Mahadevan, the Lola England de Valpine Professor of Applied Mathematics, Organismic and Evolutionary Biology, and Physics, explored this problem using a mix of mathematical modeling, computer simulations, and real-world experiments. Their findings show that in crowded conditions, introducing a controlled amount of randomness, referred to as “noise,” into how robots move can reduce congestion and significantly improve efficiency.
The work, published in Proceedings of the National Academy of Sciences, was led by applied mathematics Ph.D. student Lucy Liu, who was co-advised by SEAS Senior Research Fellow Justin Werfel. The results highlight how simple, local movement rules can give rise to complex, coordinated behavior. These insights could shape the design of robot swarms and inform how we manage crowded human environments.
Why Randomness Can Improve Efficiency
Analyzing dense crowds mathematically is extremely challenging because of the enormous number of possible interactions, Liu explained. To simplify the problem, the researchers treated each robot as a basic agent that moves with a tunable amount of “wiggle” in its path.
“This might be counterintuitive, because how could randomness make things easier to work with?” said Liu. “But in this case, when you have a lot of randomness, it becomes possible to take averages – average distances, average times, average behaviors. This makes it a lot easier to make predictions.”
Simulating Robot Swarms in Motion
To test their ideas, the team created computer simulations in which large numbers of agents started at random positions and were assigned random destinations. Once an agent reached its goal, it was immediately given a new one, mimicking continuous task assignment in real-world operations.
Each agent moved toward its goal with a controllable level of randomness. With no noise, agents traveled in perfectly straight lines. With high noise, they wandered in erratic zigzags. While zigzagging might seem inefficient, it allowed agents to maneuver around one another more easily.
The simulations revealed a clear pattern. When agents followed straight paths, they quickly formed dense traffic jams where movement stalled. When randomness was too high, congestion disappeared, but efficiency dropped because agents wandered too much. The best performance came from a middle ground, a “Goldilocks” level of noise where agents briefly interacted but could still slip past each other and keep moving.
Measuring Performance and Finding the Sweet Spot
Using these observations, the researchers developed mathematical formulas to estimate “goal attainment rate,” which measures how many tasks are completed over time. These formulas made it possible to calculate the optimal combination of crowd density and movement randomness to maximize efficiency.
Real-World Robot Experiments Confirm Results
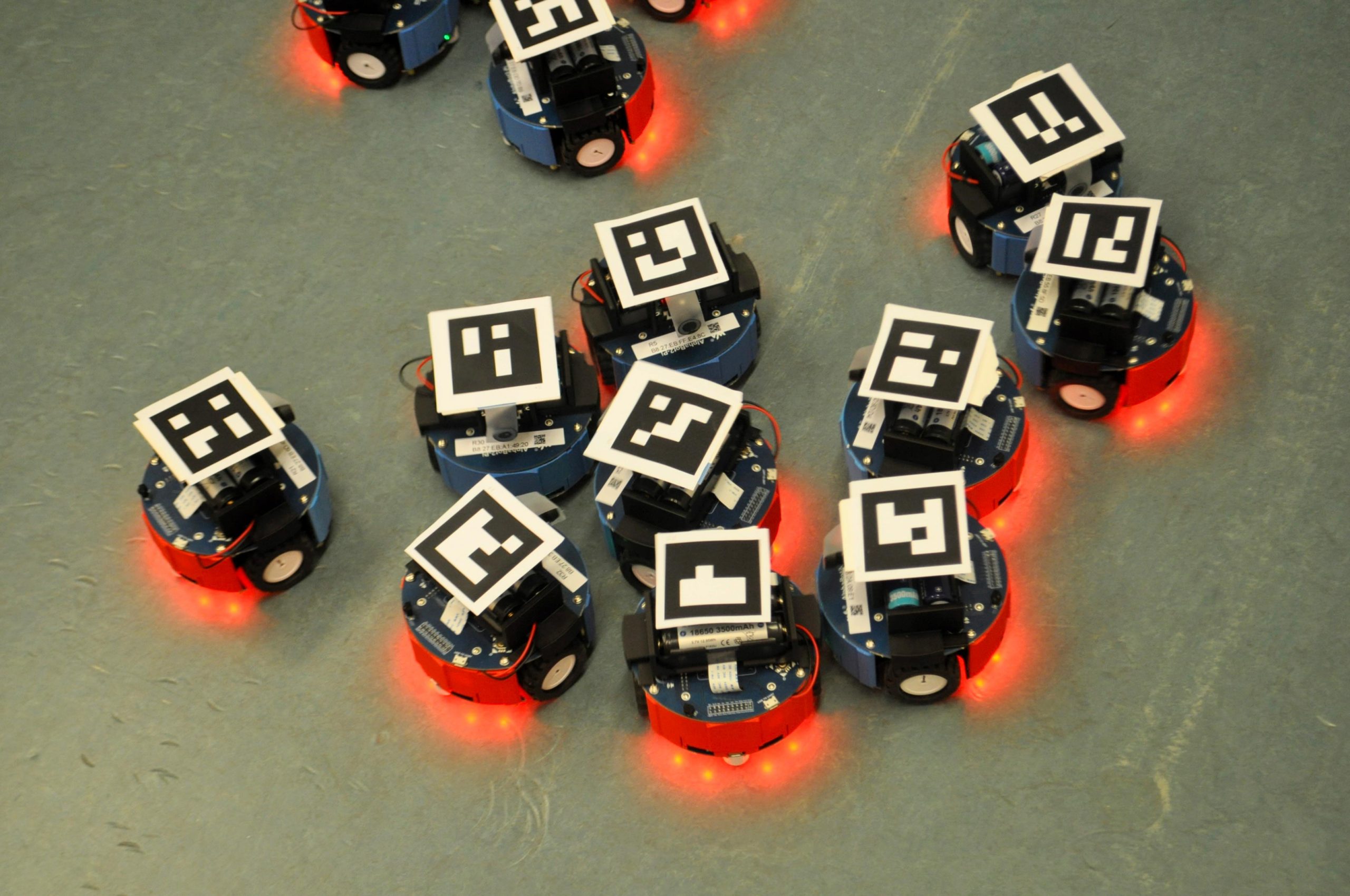
To see if their findings held up outside simulations, Liu worked with physicist Federico Toschi at Eindhoven University of Technology in the Netherlands. Together, they tested swarms of small wheeled robots in a lab equipped with an overhead camera system.
Each robot was marked with a QR code so its position could be tracked and updated in real time. Although the robots moved more slowly and less precisely than their simulated counterparts, the same patterns emerged. A moderate amount of randomness helped prevent gridlock and kept tasks progressing.
Simple Rules, Powerful Outcomes
The study reinforces an important idea. Complex coordination does not always require sophisticated central control or highly intelligent machines. Instead, simple local rules can be enough to produce efficient group behavior, at least within certain density limits.
“Understanding how active matter, whether it is a swarm of ants, a herd of animals, or a group of robots, become functional and execute tasks in crowded environments using the principles of self-organization, is relevant to many questions in behavioral ecology,” Mahadevan said. “Our study suggests strategies that might well be much broader than the instantiation we have focused on.”
Implications for Robots, Traffic, and Crowded Spaces
Liu noted that she has long been interested in designing safer and more efficient crowded environments. This research points toward a future where the movement of crowds, whether made up of people, robots, vehicles, or a combination, can be predicted and optimized using mathematical principles.
In other words, the solution to overcrowding may not be stricter control, but a carefully tuned amount of flexibility.
Reference: “Noise-enabled goal attainment in crowded collectives” by Lucy Liu, Justin Werfel, Federico Toschi and L. Mahadevan, 13 February 2026, Proceedings of the National Academy of Sciences.
DOI: 10.1073/pnas.2519032123
Funding for the research came from the National Science Foundation Graduate Research Fellowship Program under Grant No. DGE 2140743, along with grants from the Simons Foundation and the Henri Seydoux Fund.
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.
1 Comment
thanks for this