Perseverance’s AutoNav system and Ingenuity helicopter scouting allow safe, efficient Mars exploration, enabling record-breaking drives and more time for science.
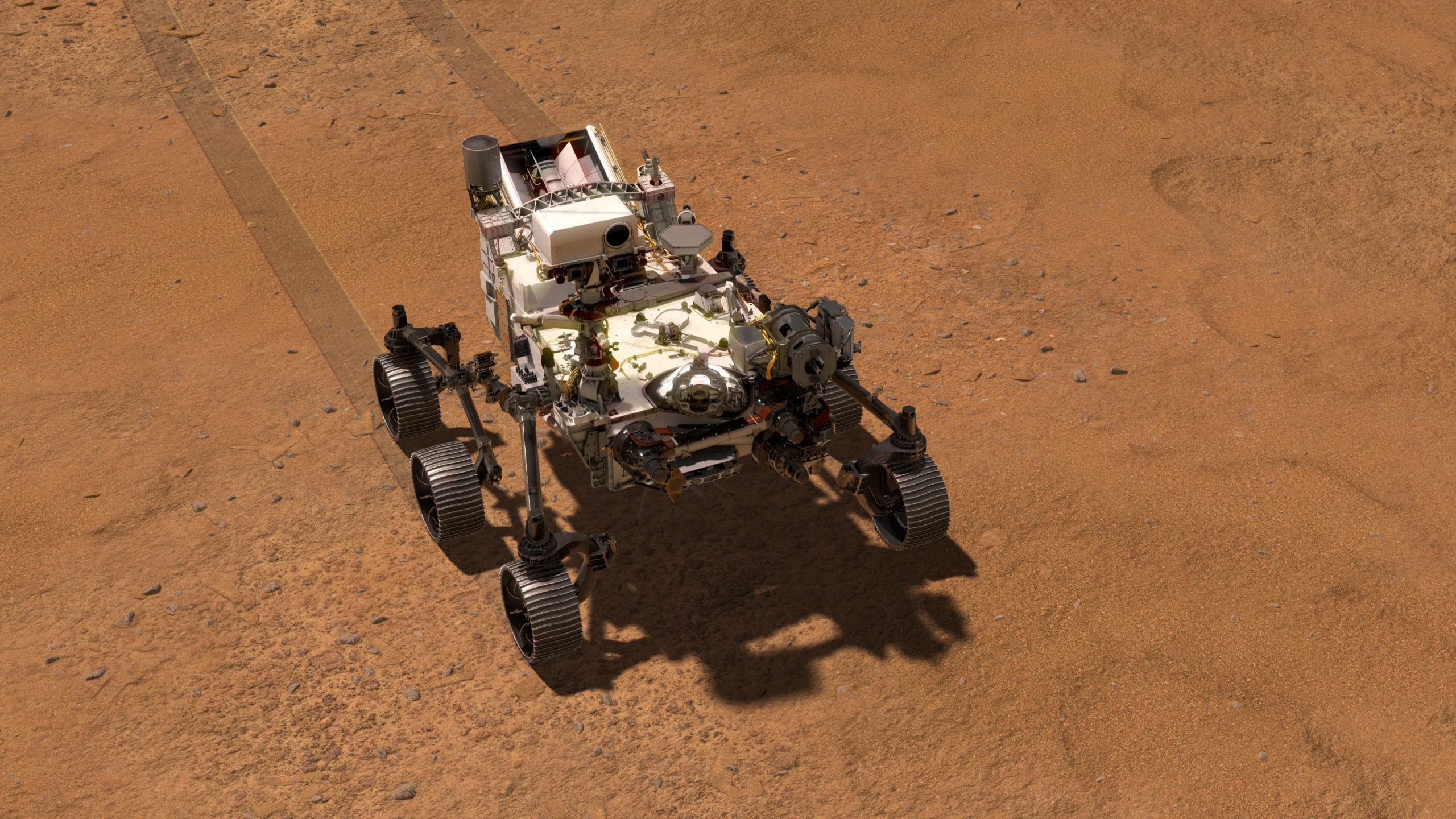
We’ve been driving on Mars since 1997, beginning with the 83 sol Sojourner rover mission. Since 2003 with the arrival of the Spirit and Opportunity rovers, followed by the Curiosity rover in 2012 and Perseverance rover in 2021 we have been continuously exploring the surface of Mars. The Perseverance mobility system was designed to enable faster and more precise autonomous driving than any prior mission. It has wheels optimized for rugged terrain, cameras with fast exposure times, wide navigation camera “Navcam” field of view, and a dedicated second computer and Field Gate Programmable Array “FPGA” for fast image processing. Visual Odometry, “VO,” tracks the motion of features in images as it is driving to provide accurate position estimates and measure slip. “Thinking-While-Driving” capability allows Perseverance to continuously drive while performing VO, generating a map of terrain geometry, and autonomously blending drive arcs and selecting a safe and efficient drive path.

An example of how Autonav helps is the drive to the area called “Citadelle” where the rover collected its first rock samples. From where Perseverance was positioned on August 20, 2021 (Sol 178), it needed to drive about 84 meters (275 feet) upslope crossing a narrow gap in a hazardous ridge toward the end to get to Citadelle. Images from the rover Navcams did not cover the gap. Images from Mars orbiters are valuable for strategic route planning, but not all rover hazards can be identified in them. Using AutoNav, Perseverance was able to drive all the way to the gap and autonomously find a safe path through the gap in a single drive.

While Perseverance was conducting the sampling campaign at Citadelle, Ingenuity was performing flights over the rover’s next potential sampling location in southern Séítah from an altitude of about 10m off the surface. Using the Ingenuity Return to Earth “RTE” camera images from Flight #12, the operations team was able to confirm the traversability of the planned strategic route into the area. On September 12, 2021 (Sol 200) Perseverance drove 175.15m (574.6ft) in a single sol setting up for the entry into Séítah after going as far as time available for driving would allow. After an 8m (26ft) segment to build the initial terrain map, the remainder 167m (548ft) of the drive used AutoNav – the farthest any of our Mars rovers have driven autonomously in a single sol.
This video shows NASA’s Perseverance Mars rover using its auto-navigation, or AutoNav, technology to drive 548 feet (167 meters) on September 12, 2021, the 200th Martian day, or sol, of the mission. AutoNav allows the rover to autonomously re-plan its route around rocks or other obstacles on its way to a pre-established destination. The video was taken by the rover’s navigation cameras; they are capable of color, but black-and-white images are better for navigation. The video has been sped up by roughly 200 times with roughly 30 seconds between frames. Credit: NASA/JPL-Caltech
AutoNav and helicopter scouting are helping Perseverance navigate efficiently between regions of interest and focus more time on science campaigns. The road ahead Is looking pretty exciting as we explore the full range of Perseverance and Ingenuity capabilities.
Written by Vandi Verma, Chief Engineer for Robotic Operations at NASA/JPL
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.
1 Comment
Admirable subjects, well written & UNDERSTANDABLE BY NEOPHYTES (ME). PLEASE CONTINUE TO INSPIRE & ASTOUND US. I AM 80 Y.O. & value quickly learned knowledge. BLESS YOU ALL.