Scientists from the Max Planck Institute have constructed swimming bodies that are small enough to be used in bodily fluids or even individual cells, and they are able to navigate through complex biological fluids.
In the 1966 movie Fantastic Voyage, a submarine complete with crew is shrunk in size so that it can navigate through the human body, enabling the crew to perform surgery in the brain. This scenario remains in the realm of science fiction, and transporting a surgical team to a disease site will certainly remain fiction. Nevertheless, tiny submarines that could navigate through the body could be of great benefit: they could deliver drugs precisely to a target location, a point on the retina for instance. And they could make it possible to carry out gene therapy in a specific cell.
If things go according to Peer Fischer, leader of the Micro, Nano and Molecular Systems Research Group at the Max Planck Institute for Intelligent Systems in Stuttgart, then doctors will in the foreseeable future call upon micro- or even nano-robots to carry out such tasks. The little helpers would accurately home-in on targets in the body, eliminating the need for more major surgery, or by making some procedures minimally invasive.
A microscopic scallop could not swim in water
However, there are two fundamental challenges to realizing these goals. Obviously, such vehicles must be small enough to be injected into the eyeball, for example, with a syringe. Secondly, once introduced into the body, they must be able to move through bodily fluids and tissue. On both fronts, the research group led by Peer Fischer has now made significant progress.

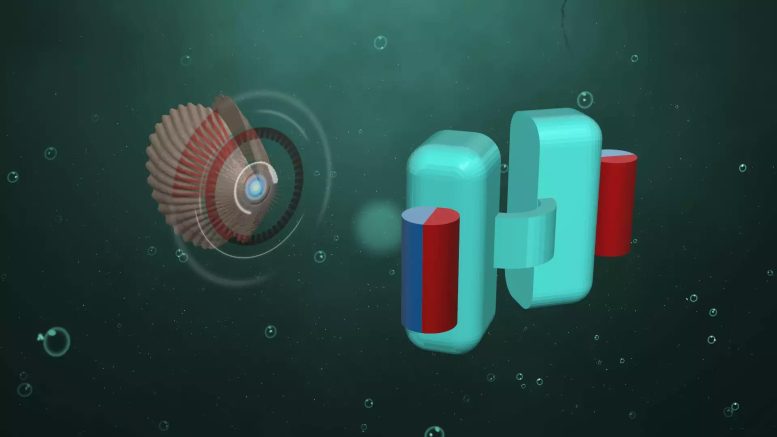
Together with researchers at the Technion in Israel and the Technical University in Dortmund, the Stuttgart-based group describes in a recent paper a kind of artificial scallop just a few hundred micrometers in diameter. They designed it so that the device travels in liquids by simply opening and closing its shells. This is not as obvious as it sounds. “The shell is only a few times larger than the thickness of a human hair,” says Fischer. “A liquid like water is about as viscous for these devices as honey or even tar is for us.” And with so much friction in fluids, symmetrical movements, such as the reciprocal opening and closing of a scallop shell, would not result in any forward propulsion. The back-and-forth movements caused by the opposing movements would simply cancel each other out.
For this reason, the micro-scallop would in fact not move from the spot. However, because the researchers have in the long term set their sights on using the device in biological media, they tested their swimmer directly in appropriate model fluids. These have characteristics that distinguish them from water. “Most bodily fluids have the property that their viscosity changes depending on the speed of movement,” says Fischer. “In synovial fluid found in joints, for example, hyaluronic acid molecules arrange themselves into network-like structures that result in a high viscosity. But as soon as something moves through this fluid, the molecular mesh breaks apart and the fluid becomes less viscous.”
Magnetic control is used to open and close the scallop
The scientists took advantage of precisely this fluid property. They control the scallop so that it opens much faster than it closes. “This temporally asymmetric pattern of movement causes the fluid to be less viscous during opening than during the subsequent closing stroke,” says doctoral student Tian Qiu, a member of the team in Stuttgart. Thus the distance the scallop travels when opening is not the same as the distance it moves backward when closing, and this causes net forward propulsion. This marks the first time an artificial device of this size has ever been able to move through fluids by means of symmetrical motion cycles, says Tian Qiu.
To control their micro-swimmers, the researchers integrated tiny rare-earth magnets in the two scallop shells. This enables them to control how the scallop shells open and close – and ultimately how the device moves – by applying an external magnetic field. However, the researchers’ discovery that micro-devices can swim through some liquids with symmetrical movements does not just apply to magnetically-driven micro-robots. Indeed, a scallop-shaped miniature submarine could also be driven by an actuator that responds, for example, to temperature changes.
The actual micro-scallop was made of a relatively hard plastic. The challenge was to make the shells extremely thin, but at the same time sturdy enough so that they remain rigid in a viscous medium.
The scientists, who have published their work in Nature Communications, want to put their micro-swimmers to the test in specific biological fluids. “We’re interested in the next step, for example, whether we can also guide this robot through the extracellular matrix of a tissue,” says Peer Fischer.
A nano-screw acts as a propeller
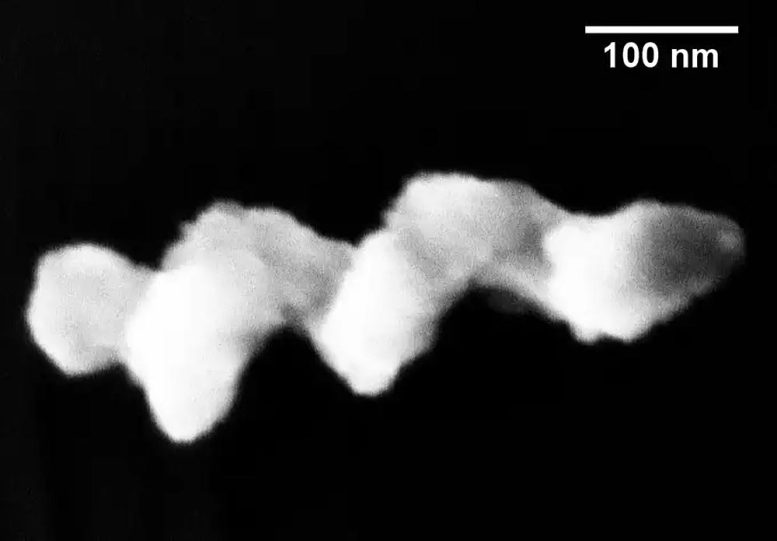
This is already the second miniature robot that Peer Fischer’s Stuttgart-based Group has presented to the scientific community within a short time. Together with colleagues from Israel, they described an even smaller device in the September issue of ACS Nano, in the form of a corkscrew-shaped nanohelix. Such helical structures have been around for a while. However, until recently their production was limited to sizes of tens of micrometers or more. Now, for the first time, the researchers in Stuttgart have succeeded in devising a suitable propeller with a diameter of around 100 nanometers, or one-tenth of a micrometer. The miniature swimmer measures just 400 nanometers in length. To make their nano-propeller, the scientists used a technique they developed themselves. They deposit the material of the helix layer by layer to form a geometrically defined pattern.
To drive their tiny robot, the scientists incorporated magnetic nickel at strategic places. When they then applied a rotating magnetic field, the nickel-containing nano-screw also started to rotate, causing the propeller to move forward through a liquid.
As in the case of their plastic micro-scallop, the researchers also envision medical applications for their nano-submarine. For this reason, they again used hyaluronic acid as a test medium. “It’s a polysaccharide whose molecules cross-link to form gel-like and therefore highly viscous structures,” explains co-author Debora Schamel, a doctoral student at the Max Planck Institute in Stuttgart. In the human body this occurs not only in the synovial fluid of the joint but also in many connective tissues.
Previous artificial structures were too large to penetrate the tightly woven network of hyaluronan molecules. Debora Schamel is therefore pleased with the progress her team has made: “For the first time we have a nano-robot that’s small enough to swim through this tight mesh.” The tiny submarine could also be used in media other than synovial fluid. Other liquids in which such nano-vehicles could deliver drugs, for example, include the vitreous humor of the eye, mucous membranes, and even blood. “Theoretically, given the size of our device, it could conceivably also be used within cells,” Fischer says cautiously. Of course, to achieve this, a way would have to be found to inject the nano-submarines into cells.
So, there is still some way to go before treatments such as those depicted in the Fantastic Voyage become reality.
References:
“Swimming by reciprocal motion at low Reynolds number” by Tian Qiu, Tung-Chun Lee, Andrew G. Mark, Konstantin I. Morozov, Raphael Münster, Otto Mierka, Stefan Turek, Alexander M. Leshansky and Peer Fischer, 4 November 2014, Nature Communications.
DOI: 10.1038/ncomms6119
“Nanopropellers and Their Actuation in Complex Viscoelastic Media” by Debora Schamel, Andrew G. Mark, John G. Gibbs, Cornelia Miksch, Konstantin I. Morozov, Alexander M. Leshansky and Peer Fischer, 9 June 2014, ACS Nano.
DOI: 10.1021/nn502360t
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.