
A new robot could explore Mars faster than ever, scanning rocks for clues to life without waiting for humans.
Exploring the surfaces of other worlds is a careful and time-consuming process. On Mars, communication between Earth and robotic explorers can take anywhere from four to 22 minutes. Limited data transfer capacity also restricts how much information can be sent back and forth. Because of these challenges, scientists must plan rover activities well in advance. Rovers are built to conserve energy and avoid risks, so they travel slowly across rough terrain. In most cases, they cover only a few hundred meters per day, which limits how much of the surrounding landscape can be studied and makes it harder to gather a wide range of geological samples.
A Semi-Autonomous Robot That Can Explore Multiple Targets
To overcome these limits, researchers tested a different strategy. They developed a semi-autonomous robotic explorer capable of moving from one target to another and collecting data without constant human guidance. Instead of focusing on a single rock under close supervision, the robot can approach several locations and perform measurements at each one independently.
The results showed that robots equipped with compact instruments can greatly improve efficiency. This method speeds up both resource prospecting and the search for ‘biosignatures’ (ie, evidence of life) on planetary surfaces. By analyzing multiple targets in sequence, the robot can gather more data in less time.
The team set out to determine whether a robot carrying a relatively simple set of scientific tools could still deliver meaningful results while working quickly. Their findings confirmed that even compact instruments are capable of achieving key scientific goals, including identifying rocks important for astrobiology and resource exploration.
Testing the ANYmal Robot in Mars-Like Conditions
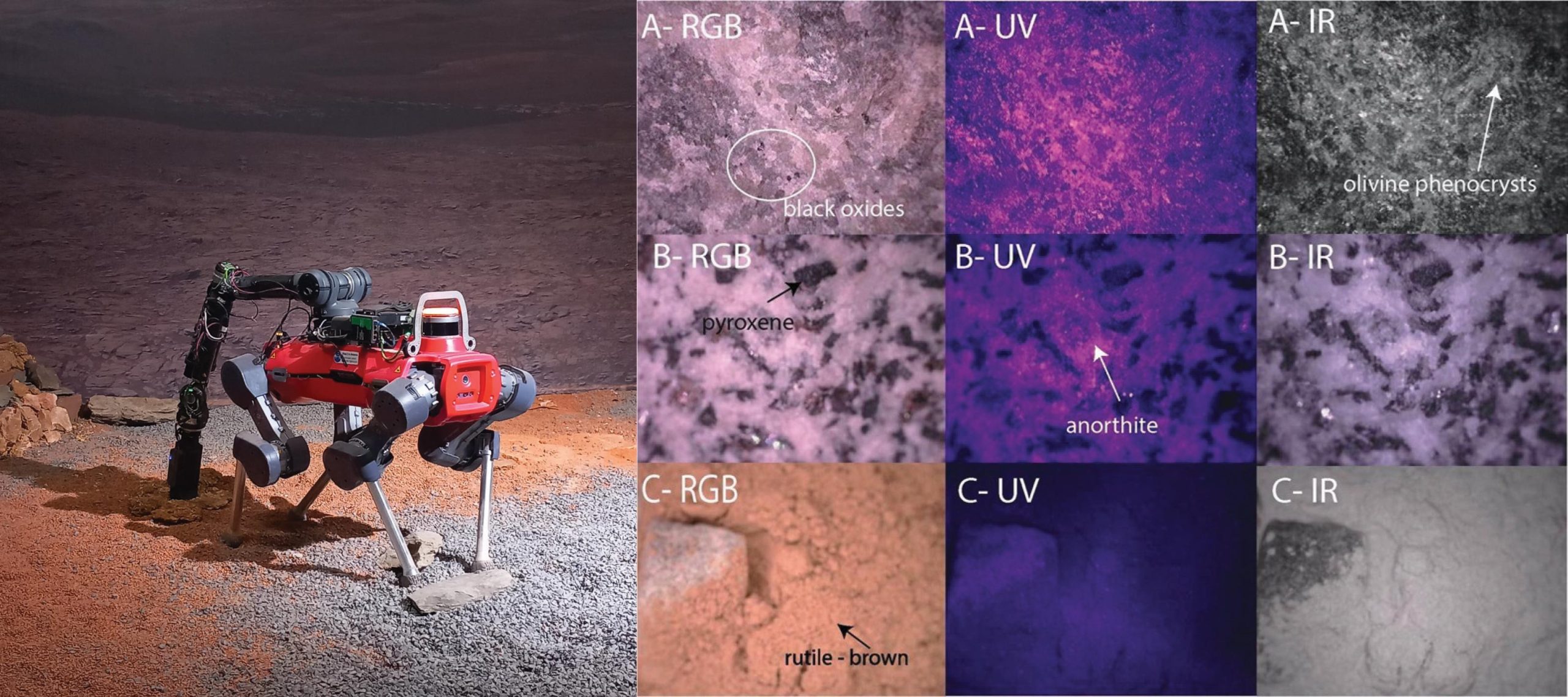
To evaluate this approach, the researchers used the four-legged robot ‘ANYmal.’ It was equipped with a robotic arm that carried two instruments: the microscopic imager MICRO and a portable Raman spectrometer developed for the ESA-ESRIC Space Resources Challenge. The project involved collaboration with the Robotic Systems Lab at ETH Zurich, ETH Zurich | Space, the University of Zurich, and the University of Bern.
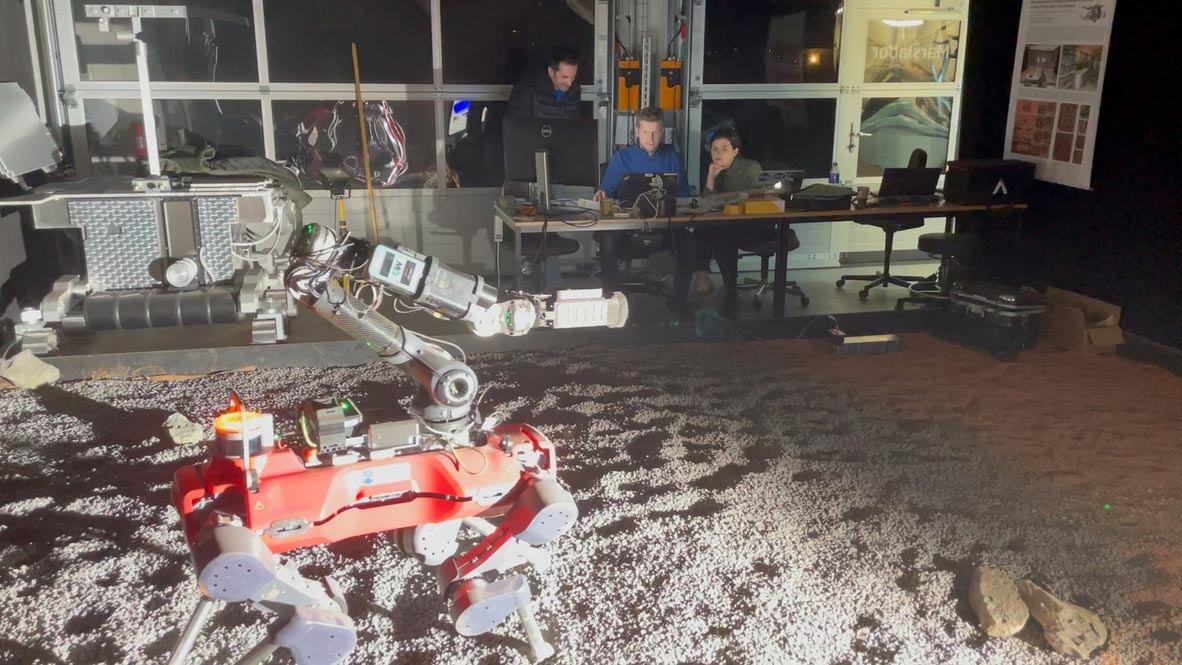
Experiments were conducted at the ‘Marslabor’ facility at the University of Basel. This environment simulates planetary surface conditions using analogue rocks, ‘regolith’ (ie, planetary dust) materials, and analog lighting conditions. During testing, the robot moved autonomously toward selected targets, positioned its instruments with the robotic arm, and sent back images and spectral data for analysis.
The system successfully identified a variety of rock types relevant to planetary exploration, including gypsum, carbonates, basalts, dunite, and anorthosite. Many of these materials are important for future missions. For example, lunar-analog rocks such as dunite (rich in olivine and oxides), anorthosite (containing anorthite), and oxides such as rutile could indicate valuable resources.
Multi-Target Exploration Speeds Up Science
Researchers compared two methods: a traditional approach where scientists guide the robot to examine one target at a time, and a semi-autonomous approach where the robot studies multiple targets in sequence.
The difference in speed was clear. Multi-target missions were completed in 12 to 23 minutes, while a similar human-guided mission took 41 minutes.
Despite working faster, the robot maintained a high level of accuracy. In one test, it correctly identified all selected targets.
This approach could allow future missions to cover much larger areas of planetary surfaces. Scientists could review the collected data and decide which locations deserve closer study.
By reducing the need for step-by-step human commands, robots can move more freely across terrain, quickly scan rocks, and gather valuable data. This makes it possible to carry out scientific investigations much more efficiently and helps researchers focus on the most promising samples.
Preparing for Future Missions to the Moon and Mars
The study shows that relatively simple instruments can still produce valuable scientific insights when combined with autonomous robotic systems. Instead of relying entirely on large and complex equipment, future missions could use agile robots to rapidly survey their surroundings and identify key targets for detailed analysis.
As space agencies prepare for missions to the Moon, Mars, and beyond, semi-autonomous robots like this could play an important role. By covering more ground in less time, they could support both resource prospecting and the search for possible signs of past life.
Reference: “Semi-autonomous exploration of martian and lunar analogues with a legged robot using a Raman-equipped robotic arm and microscopic imager” by Gabriela Ligeza, Philip Arm, Tomaso R. R. Bontognali, Valentin T. Bickel, Hendrik Kolvenbach, Nikolaus J. Kuhn and Florian Kehl, 27 January 2026, Frontiers in Space Technologies.
DOI: 10.3389/frspt.2026.1741757
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.
1 Comment
Let’s load some of those robot dogs with AIs and cameras and let them loose on Mars and the Moon.