Cygnus X-1 is more massive and spins faster than earlier thought, reshaping our understanding of stellar-mass black holes.
New observations of the first black hole ever detected have led astronomers to question what they know about the Universe’s most mysterious objects.
Published today (February 18, 2021) in the journal Science, the research shows the system known as Cygnus X-1 contains the most massive stellar-mass black hole ever detected without the use of gravitational waves.
Cygnus X-1 is one of the closest black holes to Earth. It was discovered in 1964 when a pair of Geiger counters were carried on board a sub-orbital rocket launched from New Mexico.
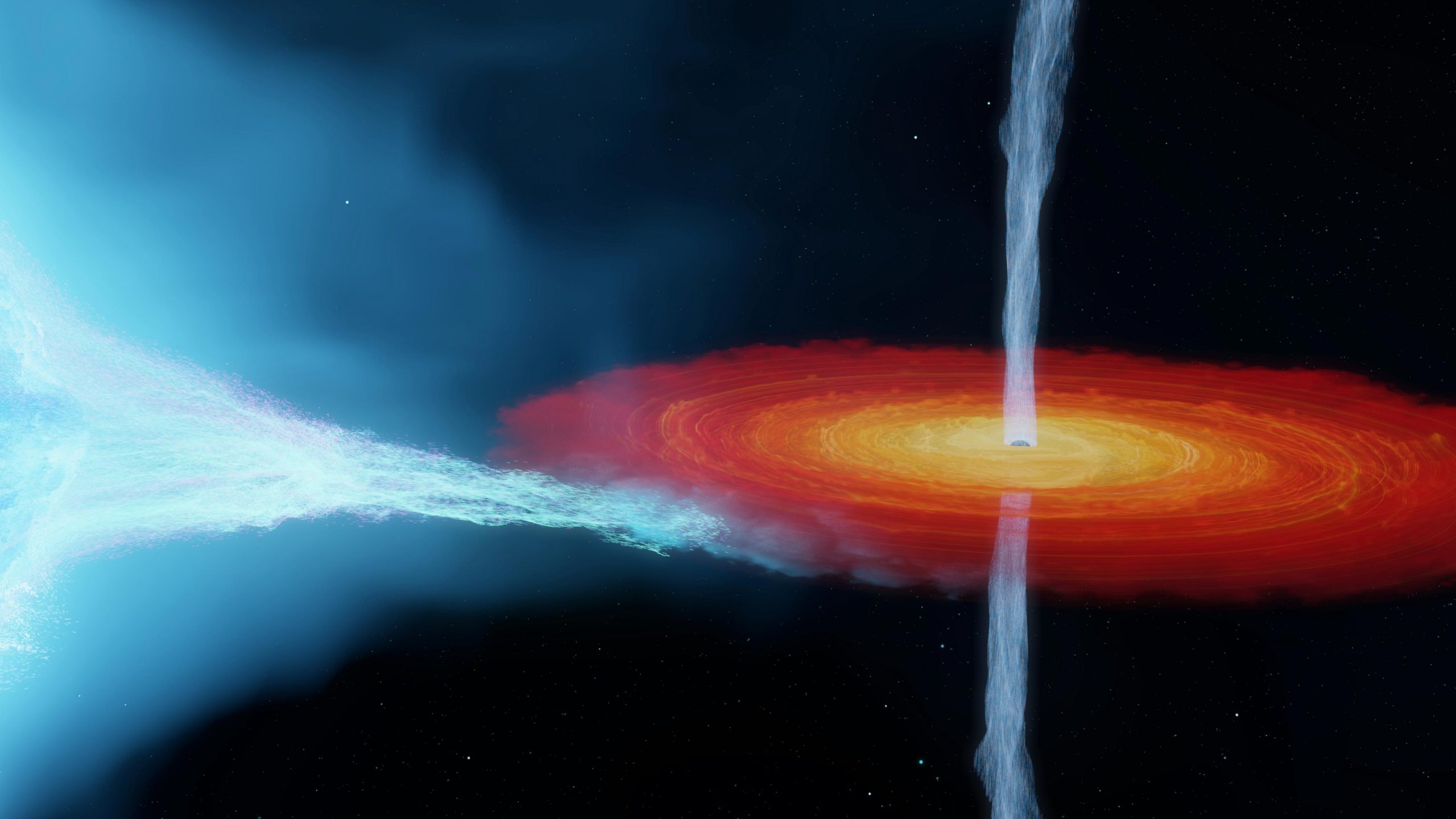
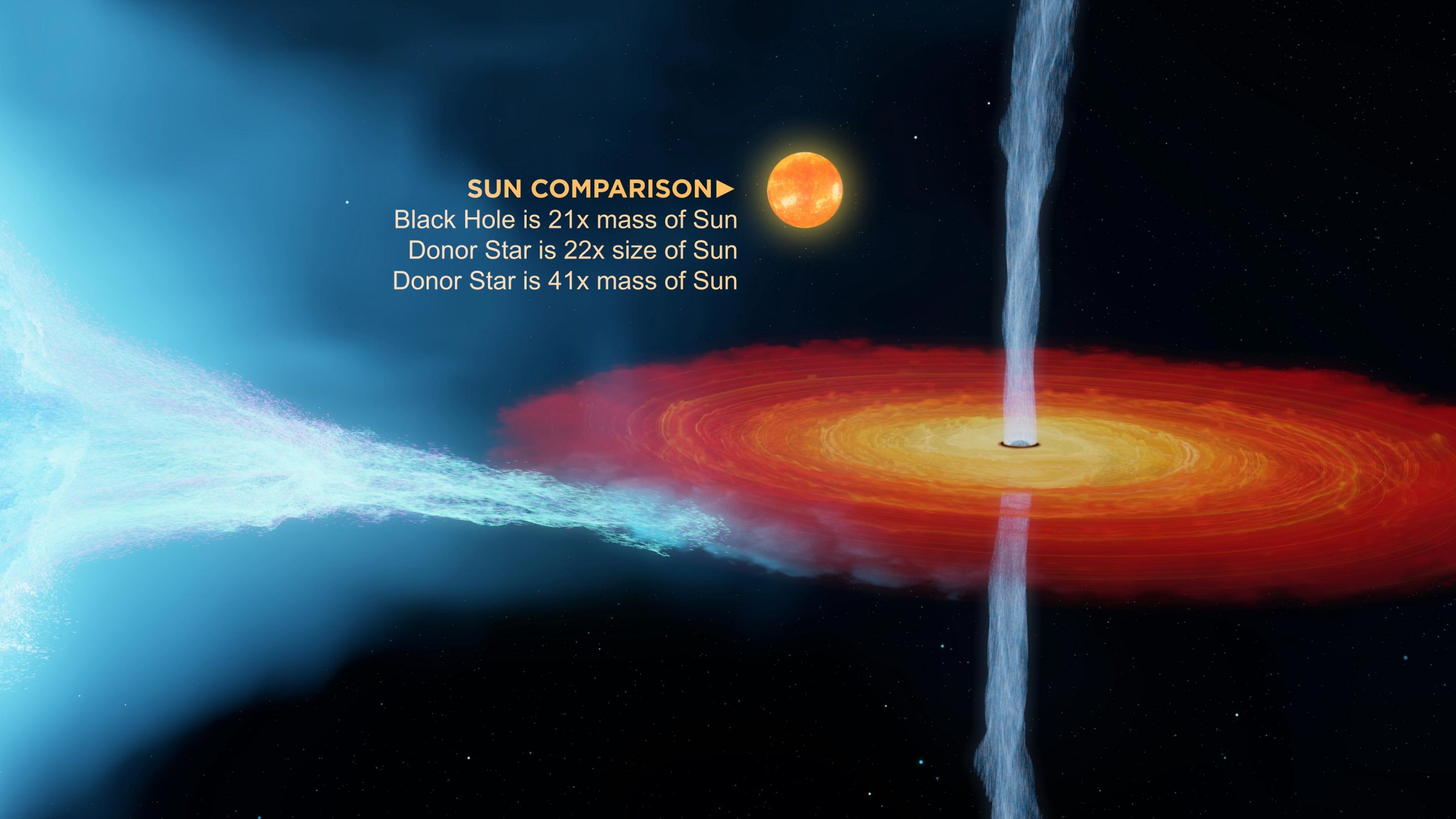
An animation showing the Cygnus X-1 system, consisting of a black hole in orbit with a giant star. Recent observations by radio telescopes have found the system is 20 percent further away than previously thought, implying the black hole is 21 times the mass of the Sun, making it the most massive stellar-mass black hole ever detected without the use of gravitational waves. Credit: International Center for Radio Astronomy Research
The object was the focus of a famous scientific wager between physicists Stephen Hawking and Kip Thorne, with Hawking betting in 1974 that it was not a black hole. Hawking conceded the bet in 1990.
In this latest work, an international team of astronomers used the Very Long Baseline Array—a continent-sized radio telescope made up of 10 dishes spread across the United States—together with a clever technique to measure distances in space.
“If we can view the same object from different locations, we can calculate its distance away from us by measuring how far the object appears to move relative to the background,” said lead researcher, Professor James Miller-Jones from Curtin University and the International Center for Radio Astronomy Research (ICRAR).
“If you hold your finger out in front of your eyes and view it with one eye at a time, you’ll notice your finger appears to jump from one spot to another. It’s exactly the same principle.”
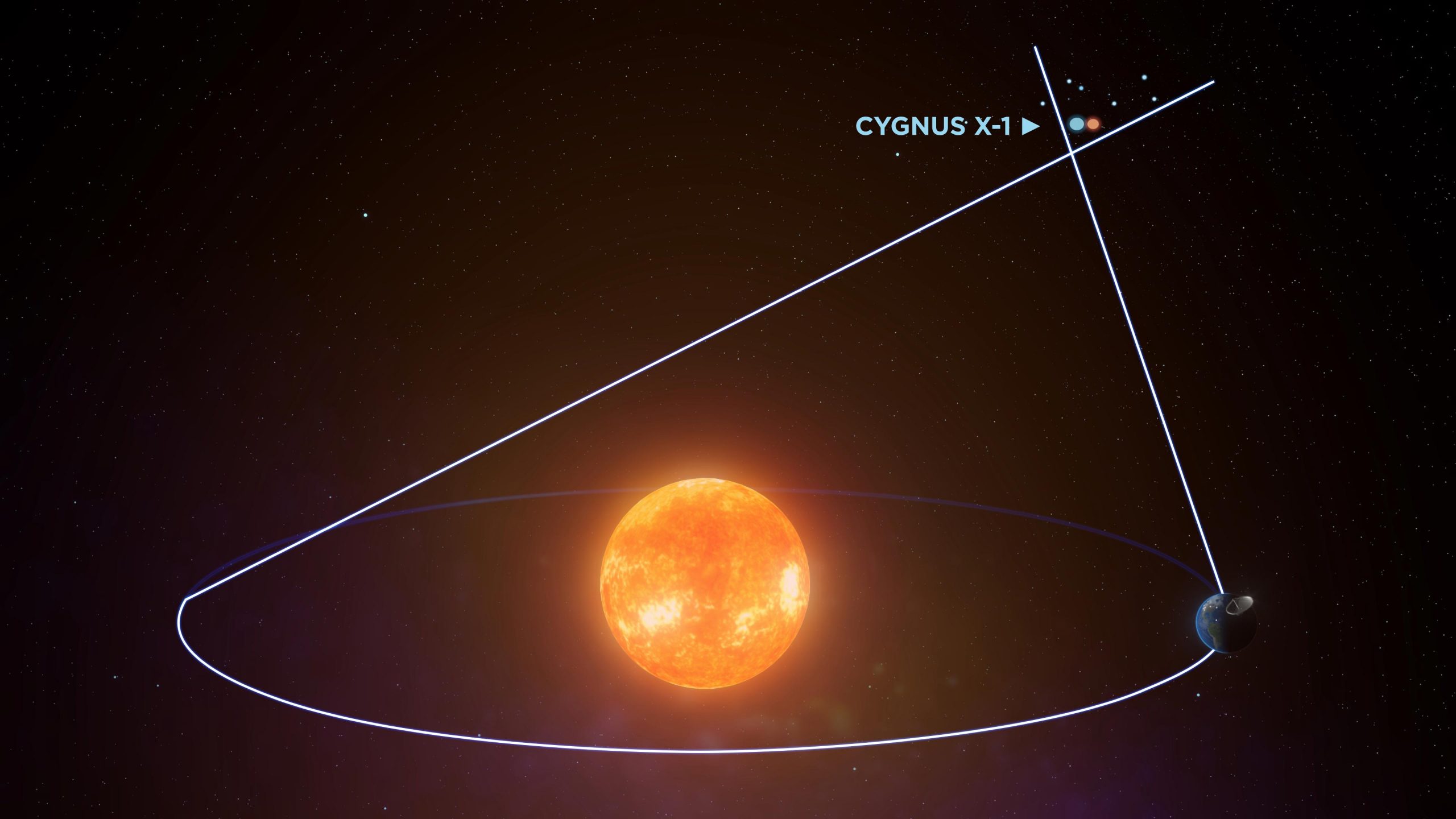
“Over six days we observed a full orbit of the black hole and used observations taken of the same system with the same telescope array in 2011,” Professor Miller-Jones said. “This method and our new measurements show the system is further away than previously thought, with a black hole that’s significantly more massive.”
Co-author Professor Ilya Mandel from Monash University and the ARC Center of Excellence in Gravitational Wave Discovery (OzGrav) said the black hole is so massive it’s actually challenging how astronomers thought they formed.
“Stars lose mass to their surrounding environment through stellar winds that blow away from their surface. But to make a black hole this heavy, we need to dial down the amount of mass that bright stars lose during their lifetimes” he said.
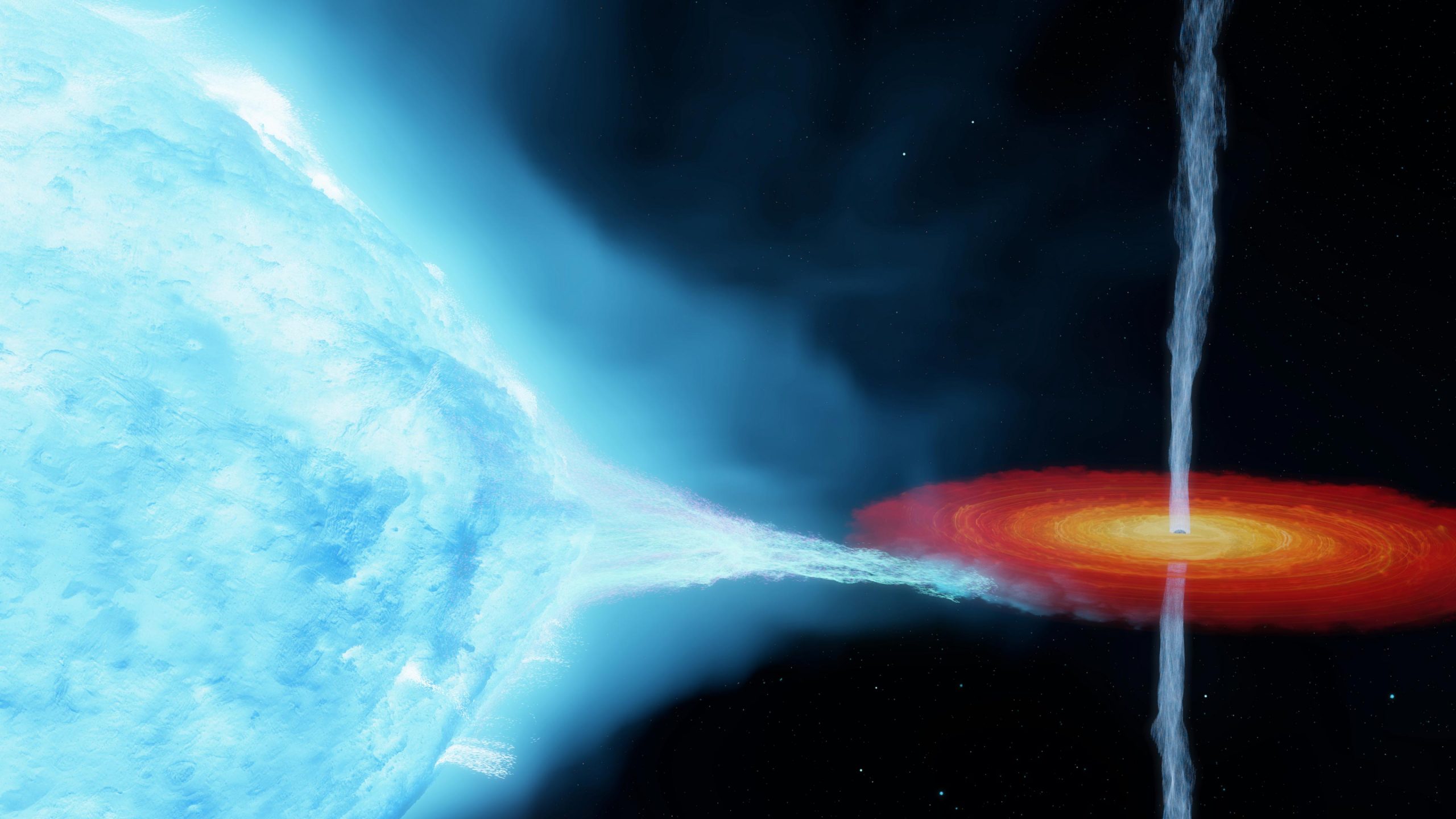
“The black hole in the Cygnus X-1 system began life as a star approximately 60 times the mass of the Sun and collapsed tens of thousands of years ago,” he said. “Incredibly, it’s orbiting its companion star—a supergiant—every five and a half days at just one-fifth of the distance between the Earth and the Sun.
“These new observations tell us the black hole is more than 20 times the mass of our Sun—a 50 percent increase on previous estimates.”
Xueshan Zhao is a co-author on the paper and a PhD candidate studying at the National Astronomical Observatories—part of the Chinese Academy of Sciences (NAOC) in Beijing.
“Using the updated measurements for the black hole’s mass and its distance away from Earth, I was able to confirm that Cygnus X-1 is spinning incredibly quickly—very close to the speed of light and faster than any other black hole found to date,” she said.
“I’m at the beginning of my research career, so being a part of an international team and helping to refine the properties of the first black hole ever discovered has been a great opportunity.”
Next year, the world’s biggest radio telescope — the Square Kilometer Array (SKA) — will begin construction in Australia and South Africa.
“Studying black holes is like shining a light on the Universe’s best-kept secret — it’s a challenging but exciting area of research,” Professor Miller-Jones said.
“As the next generation of telescopes comes online, their improved sensitivity reveals the Universe in increasingly more detail, leveraging decades of effort invested by scientists and research teams around the world to better understand the cosmos and the exotic and extreme objects that exist.
“It’s a great time to be an astronomer.”
References:
“Cygnus X-1 contains a 21-solar mass black hole – implications for massive star winds” by James C. A. Miller-Jones, Arash Bahramian, Jerome A. Orosz, Ilya Mandel, Lijun Gou, Thomas J. Maccarone, Coenraad J. Neijssel, Xueshan Zhao, Janusz Ziólkowski, Mark J. Reid, Phil Uttley, Xueying Zheng, Do-Young Byun, Richard Dodson, Victoria Grinberg, Taehyun Jung, Jeong-Sook Kim, Benito Marcote, Sera Markoff, María J. Rioja, Anthony P. Rushton, David M. Russell, Gregory R. Sivakoff, Alexandra J. Tetarenko, Valeriu Tudose and Joern Wilms, 18 February 2021, Science.
DOI: 10.1126/science.abb3363
“Reestimating the Spin Parameter of the Black Hole in Cygnus X-1” by Xueshan Zhao, Lijun Gou, Yanting Dong, Xueying Zheng, James F. Steiner, James C.A. Miller-Jones, Arash Bahramian, Jerome A. Orosz and Ye Feng, 18 February 2021, The Astrophysical Journal.
DOI: 10.3847/1538-4357/abbcd6
arXiv: 2102.09093
“Wind mass-loss rates of stripped stars inferred from Cygnus X-1” by Coenraad J. Neijssel, Serena Vinciguerra, Alejandro Vigna-Gomez, Ryosuke Hirai, James C. A. Miller-Jones, Arash Bahramian, Thomas J. Maccarone and Ilya Mandel, 18 February 2021, The Astrophysical Journal.
DOI: 10.3847/1538-4357/abde4a
arXiv: 2102.09092
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.
1 Comment
time to listen to Rush – “Hemispheres”