
Using a sense of touch, a robot hand can manipulate in the dark, or in difficult lighting conditions. Credit: Columbia University ROAM Lab
Columbia Engineers have created a groundbreaking robot hand that seamlessly integrates advanced touch sensing with motor-learning algorithms, allowing it to manipulate objects without relying on vision.
Consider the actions you take with your hands when you’re at home in the evening using your TV remote or when dining out and handling various utensils and glasses. These abilities are rooted in touch, allowing you to navigate a TV program or make a menu selection without taking your eyes off the screen. Our hands and fingers are incredibly talented instruments, boasting a high level of sensitivity.
For many years, robotics researchers have been striving to achieve “true” dexterity in robot hands, yet this objective has proven to be challenging. While robot grippers and suction cups are capable of picking up and placing objects, tasks requiring greater dexterity, such as assembly, insertion, reorientation, packaging, etc., have continued to be the domain of human manipulation. However, recent advancements in both sensing technology and machine learning methods to analyze the collected data have caused a rapid transformation in the field of robotic manipulation.
Dexterous manipulation with tactile fingers. Credit: Columbia University School of Engineering and Applied Science
Highly dexterous robot hand even works in the dark
Researchers at Columbia Engineering have demonstrated a highly dexterous robot hand, one that combines an advanced sense of touch with motor learning algorithms in order to achieve a high level of dexterity.
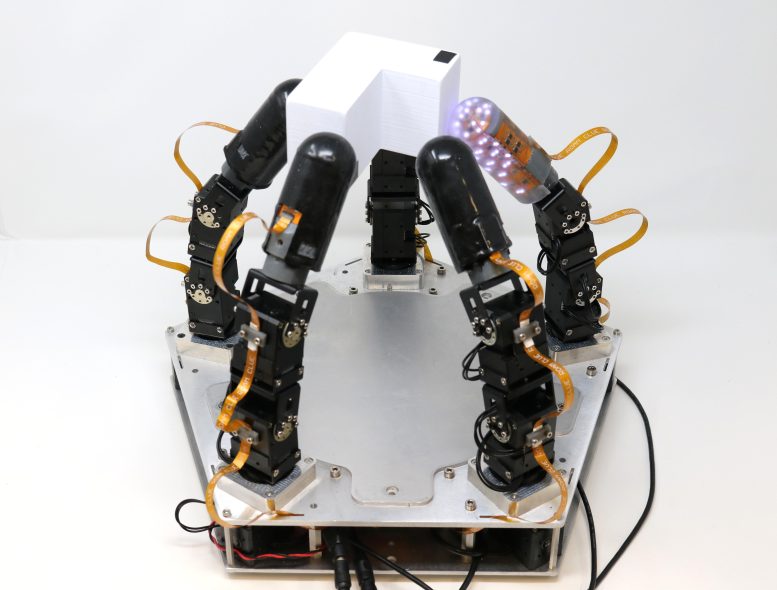
As a demonstration of skill, the team chose a difficult manipulation task: executing an arbitrarily large rotation of an unevenly shaped grasped object in hand while always maintaining the object in a stable, secure hold. This is a very difficult task because it requires constant repositioning of a subset of fingers, while the other fingers have to keep the object stable. Not only was the hand able to perform this task, but it also did it without any visual feedback whatsoever, based solely on touch sensing.
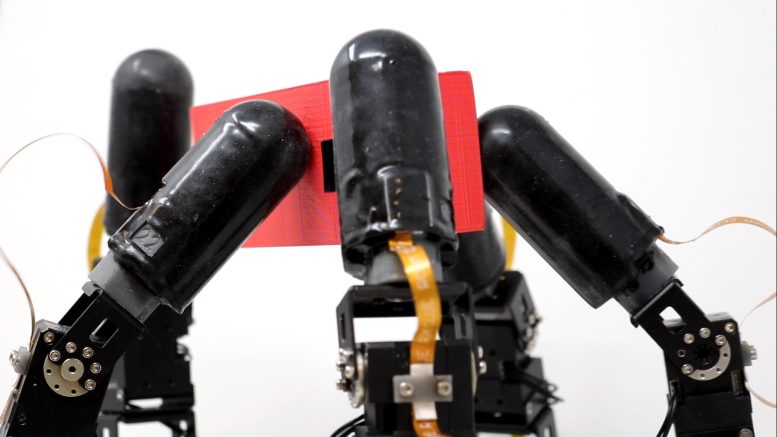
Machine learning algorithms process the data from the tactile sensors to produce coordinated finger movement patterns for manipulation. Credit: Columbia University ROAM Lab
In addition to the new levels of dexterity, the hand worked without any external cameras, so it’s immune to lighting, occlusion, or similar issues. And the fact that the hand does not rely on vision to manipulate objects means that it can do so in very difficult lighting conditions that would confuse vision-based algorithms–it can even operate in the dark.
“While our demonstration was on a proof-of-concept task, meant to illustrate the capabilities of the hand, we believe that this level of dexterity will open up entirely new applications for robotic manipulation in the real world,” said Matei Ciocarlie, associate professor in the Departments of Mechanical Engineering and Computer Science. “Some of the more immediate uses might be in logistics and material handling, helping ease up supply chain problems like the ones that have plagued our economy in recent years, and in advanced manufacturing and assembly in factories.”
Leveraging optics-based tactile fingers
In earlier work, Ciocarlie’s group collaborated with Ioannis Kymissis, professor of electrical engineering, to develop a new generation of optics-based tactile robot fingers. These were the first robot fingers to achieve contact localization with sub-millimeter precision while providing complete coverage of a complex multi-curved surface. In addition, the compact packaging and low wire count of the fingers allowed for easy integration into complete robot hands.
A dexterous robot hand equipped with five tactile fingers. One of the fingers is shown here with the outermost “skin” layer removed, to show the internal structure. Credit: Columbia University ROAM Lab
Teaching the hand to perform complex tasks
For this new work, led by CIocarlie’s doctoral researcher, Gagan Khandate, the researchers designed and built a robot hand with five fingers and 15 independently actuated joints–each finger was equipped with the team’s touch-sensing technology. The next step was to test the ability of the tactile hand to perform complex manipulation tasks. To do this, they used new methods for motor learning, or the ability of a robot to learn new physical tasks via practice. In particular, they used a method called deep reinforcement learning, augmented with new algorithms that they developed for effective exploration of possible motor strategies.
Robot completed approximately one year of practice in only hours of real-time
The input to the motor learning algorithms consisted exclusively of the team’s tactile and proprioceptive data, without any vision. Using simulation as a training ground, the robot completed approximately one year of practice in only hours of real-time, thanks to modern physics simulators and highly parallel processors. The researchers then transferred this manipulation skill trained in simulation to the real robot hand, which was able to achieve the level of dexterity the team was hoping for. Ciocarlie noted that “the directional goal for the field remains assistive robotics in the home, the ultimate proving ground for real dexterity. In this study, we’ve shown that robot hands can also be highly dexterous based on touch sensing alone. Once we also add visual feedback into the mix along with touch, we hope to be able to achieve even more dexterity, and one day start approaching the replication of the human hand.”
The ultimate goal: joining abstract intelligence with embodied intelligence
Ultimately, Ciocarlie observed, a physical robot being useful in the real world needs both abstract, semantic intelligence (to understand conceptually how the world works), and embodied intelligence (the skill to physically interact with the world). Large language models such as OpenAI’s GPT-4 or Google’s PALM aim to provide the former, while dexterity in manipulation as achieved in this study represents complementary advances in the latter.
For instance, when asked how to make a sandwich, ChatGPT will type out a step-by-step plan in response, but it takes a dexterous robot to take that plan and actually make the sandwich. In the same way, researchers hope that physically skilled robots will be able to take semantic intelligence out of the purely virtual world of the Internet, and put it to good use on real-world physical tasks, perhaps even in our homes.
Reference: “Sampling-based Exploration for Reinforcement Learning of Dexterous Manipulation” by Gagan Khandate, Siqi Shang, Eric T. Chang, Tristan Luca Saidi, Johnson Adams and Matei Ciocarlie, 11 March 2023, arXiv.
DOI: 10.48550/arXiv.2303.03486
The study was funded by the Office of Naval Research and the National Science Foundation.







Be the first to comment on "Columbia Engineers Create Highly Dexterous Human-Like Robot Hand That Can Operate in the Dark"