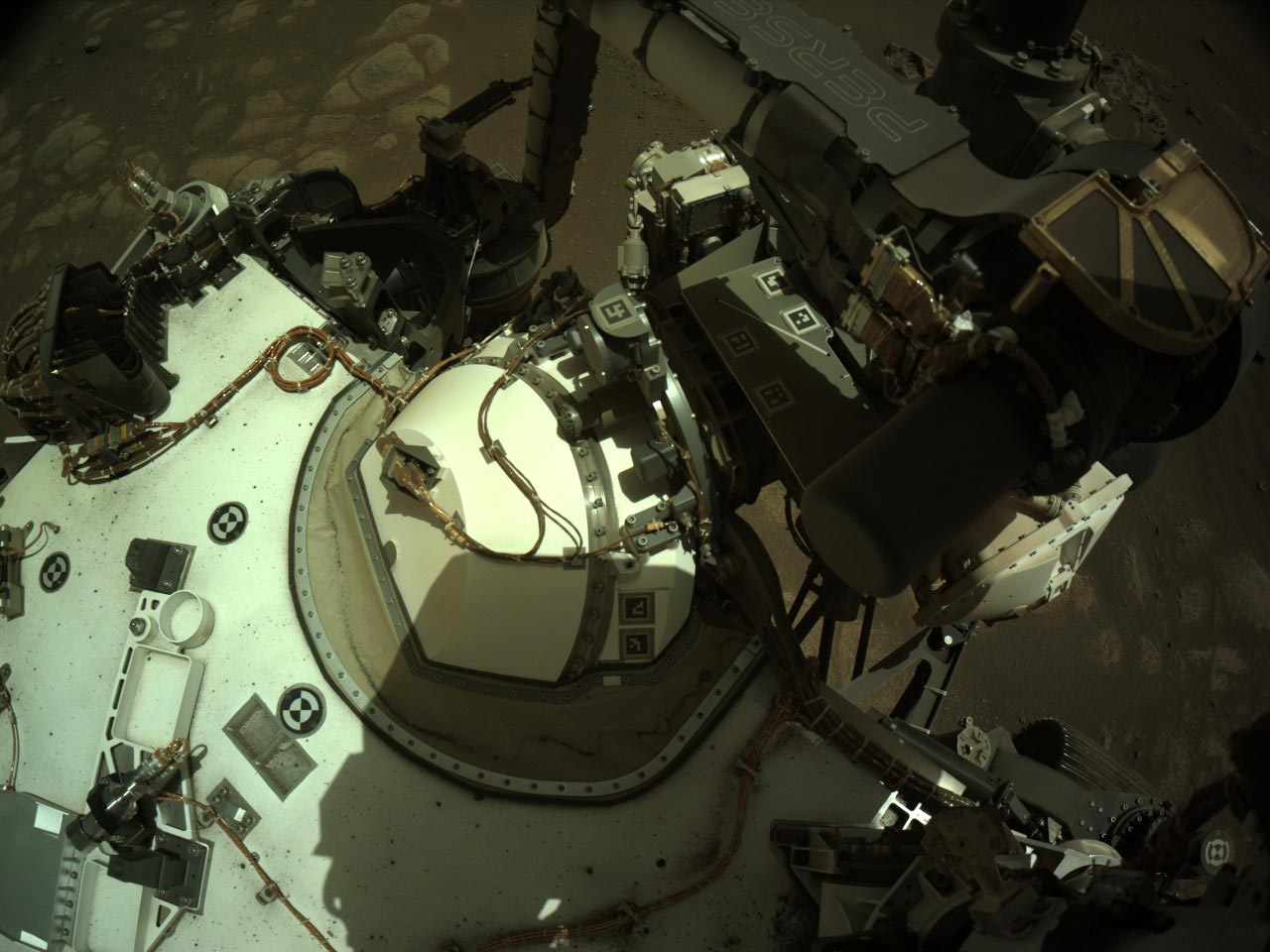
Every time we collect a rock sample on Mars, Perseverance performs an hours-long set of carefully choreographed operations with its robotic arm, the coring drill, and the Adaptive Caching Assembly. One of these operations is docking: the process by which the arm aligns itself with the Bit Carousel on the front of the rover, so that the corer can drop off and pick up new drill bits.
Docking happens twice during sample collection. First, the robotic arm docks to drop off the currently-chucked abrading bit and pick up a coring bit with an empty sample tube. Then, after collecting a rock sample, it docks again to drop off the coring bit with a now-filled sample tube, which will be processed, sealed, and stored by the caching assembly.
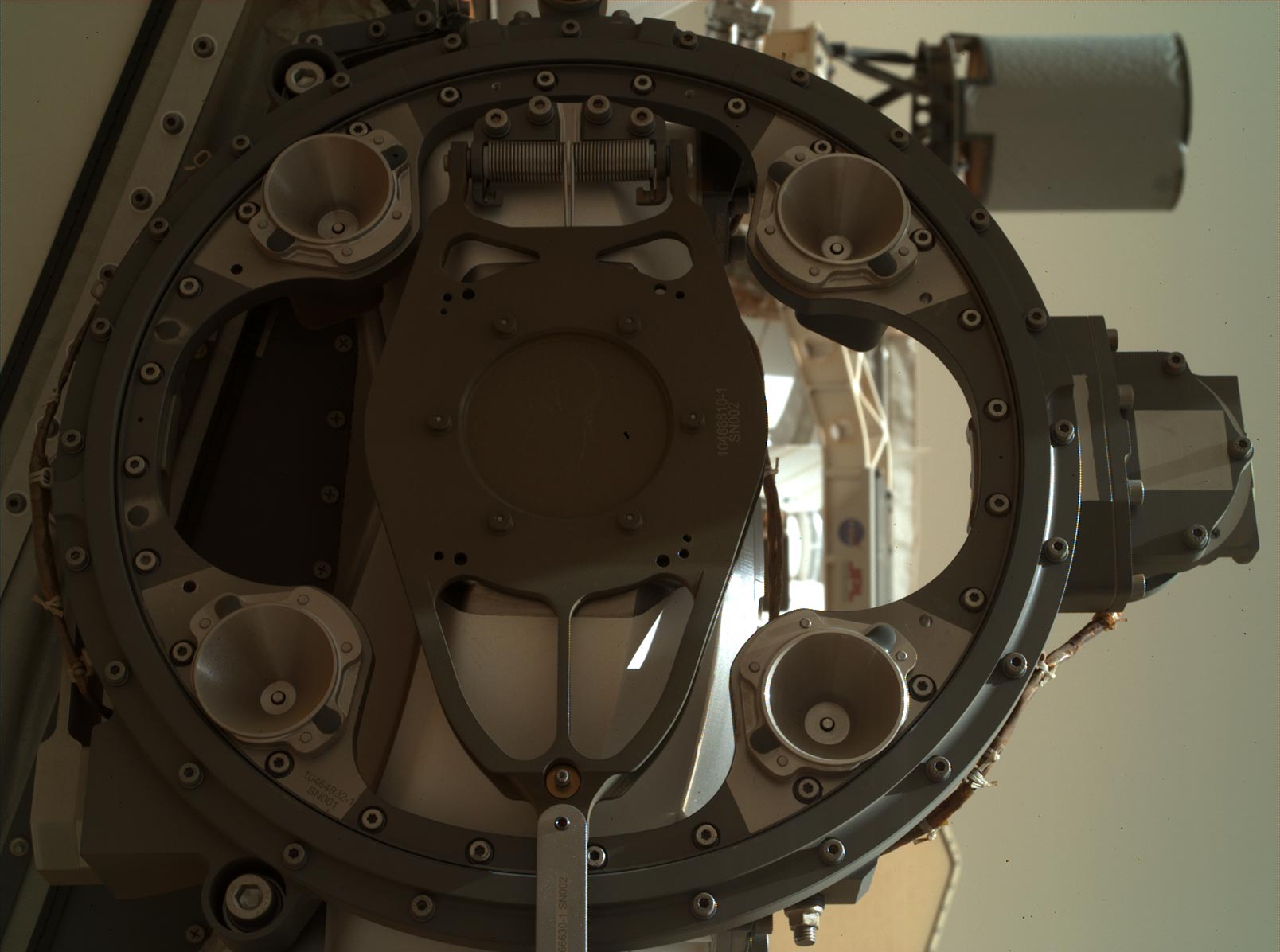
Docking works by guiding a set of small posts on the end of the robotic arm into a matching set of cones on the dock. Imagine plugging your charger into your phone or computer – even if you don’t think about it, you rely a lot on the tactile feedback from your hand and fingertips to feel if you need to slide the plug to the side, to line it up a little better, and to know when it’s reached the bottom. Docking works the same way. A force sensor on the end of the robotic arm tells Perseverance how hard it’s pushing and in which directions, and Perseverance uses this data to guide the arm into place and to determine when docking is complete. (The dock also includes microswitches at the bottom of each cone which are pressed when the arm is almost docked, which serve as an extra verification). Once the posts reach the bottom of the cones, the robotic arm pushes harder into the dock with almost 650N (146 lbs) of force to make sure it stays docked during bit exchange.
I’ve worked on docking for most of my 6-year career at JPL, and my goal has been to make it reliable and easy – just like plugging in your phone. Getting to this point required a lot of design and testing (including docking almost 2000 times in various testbeds here on Earth), and it’s been a privilege to see docking happen successfully many times on Mars already. I’ll always be a little nervous every time we collect a sample, but my fingers are crossed for many more successful and easy docking attempts.
Written by Sawyer Brooks, Docking Systems Engineer at NASA/JPL.
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.