
What might look like a dangling hamster ball is actually a robotic sphere to explore the depths of lunar caves.
Designed by a team coordinated by Germany’s Julius-Maximilians-Universität of Würzburg (JMU), the Descent And Exploration in Deep Autonomy of Lunar Underground Structures, DAEDALUS, robot is being evaluated by ESA’s Concurrent Design Facility, as part of a larger study of lunar cave mission concepts.
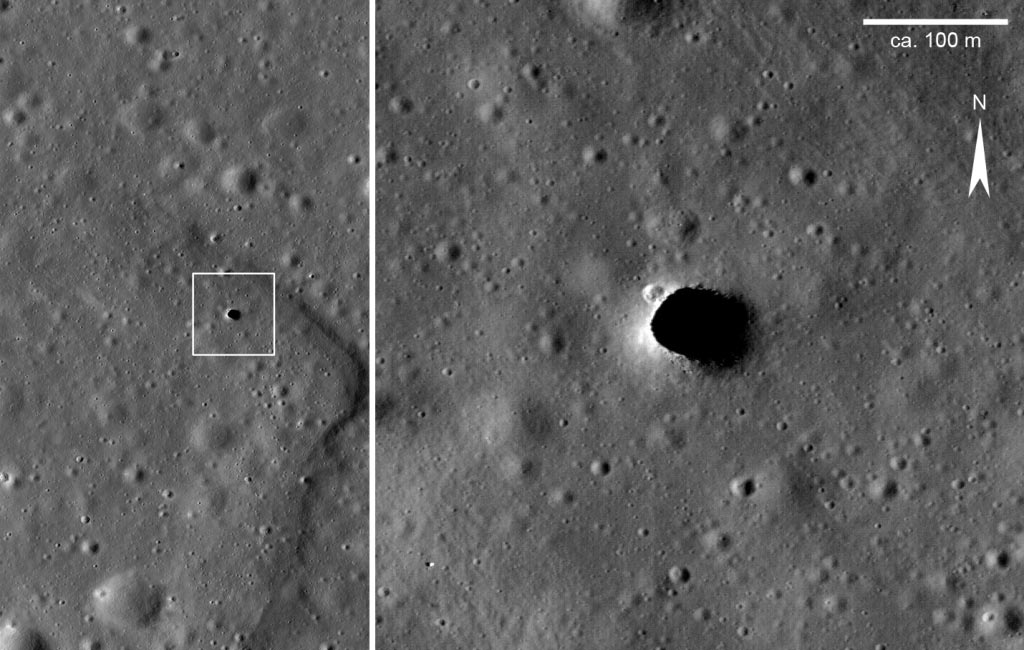
Lunar orbiters have mapped multiple deep pits on the surface of the Moon, believed to be ‘skylights’ into lava caves. These are of high scientific interest, offering access to pristine lunar material – perhaps even water ice deposits. Such caves might also become habitats for lunar settlers, offering natural shielding against radiation, micrometeorites, and surface temperature extremes.
The 46-cm (18-in) diameter DAEDALUS sphere would carry an immersive stereoscopic camera, a ‘laser radar’ lidar system for 3D mapping of cave interiors, temperature sensors, and a radiation dosimeter, as well as extendible arms to help clear obstacles and test rock properties.
DAEDALUS would first be lowered into the cave mouth on a long tether, then disconnect to roll away autonomously under its own power. The hanging tether would then double as a Wi-Fi receiver, allowing DAEDALUS to relay its findings out of the pit.
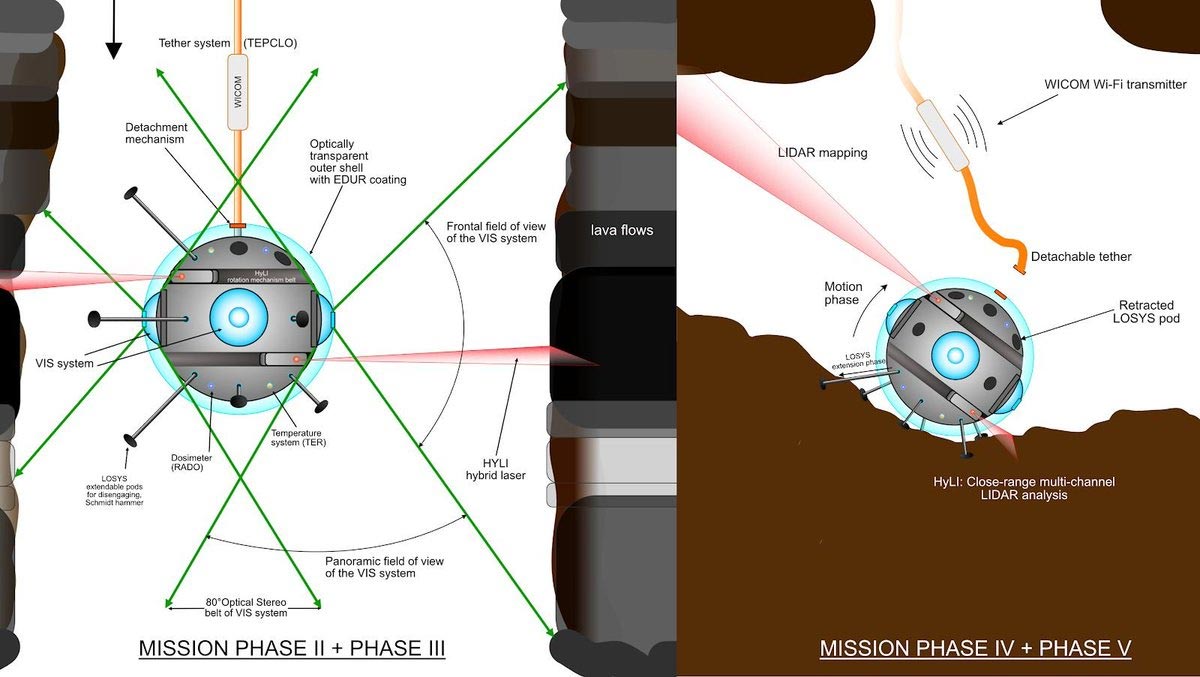
“The design is driven by the requirement to observe the surroundings in full 360 degrees and the necessity to protect the interior from the harsh lunar environment,” explains Dorit Borrmann of the DAEDALUS team. “With the cameras acting as a stereo vision system and the laser distance measurements, the sphere detects obstacles during descent and navigates autonomously upon reaching the pit floor.”
The consortium led by JMU has developed the robot as part of a larger Lunar Caves-System Study, carried out in response to an ESA Open Space Innovation Platform call. Partnering in this study is Germany’s Jacobs University Bremen, CISAS and the Department of Geosciences of the University of Padova, INAF-Astronomical Observatory of Padova, the VIGEA-Virtual Geographic Agency of Reggio Emilia and CIRA Space Exploration Technologies Department, all in Italy.
The study is being evaluated along with other lunar cave exploration concepts at ESA’s Concurrent Design Facility at ESTEC in the Netherlands, bringing together space engineering experts to perform rapid analysis of future mission proposals.
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.