
A little robotic explorer will be rolling into Antarctica this month to perform a gymnastic feat — driving upside down under sea ice.
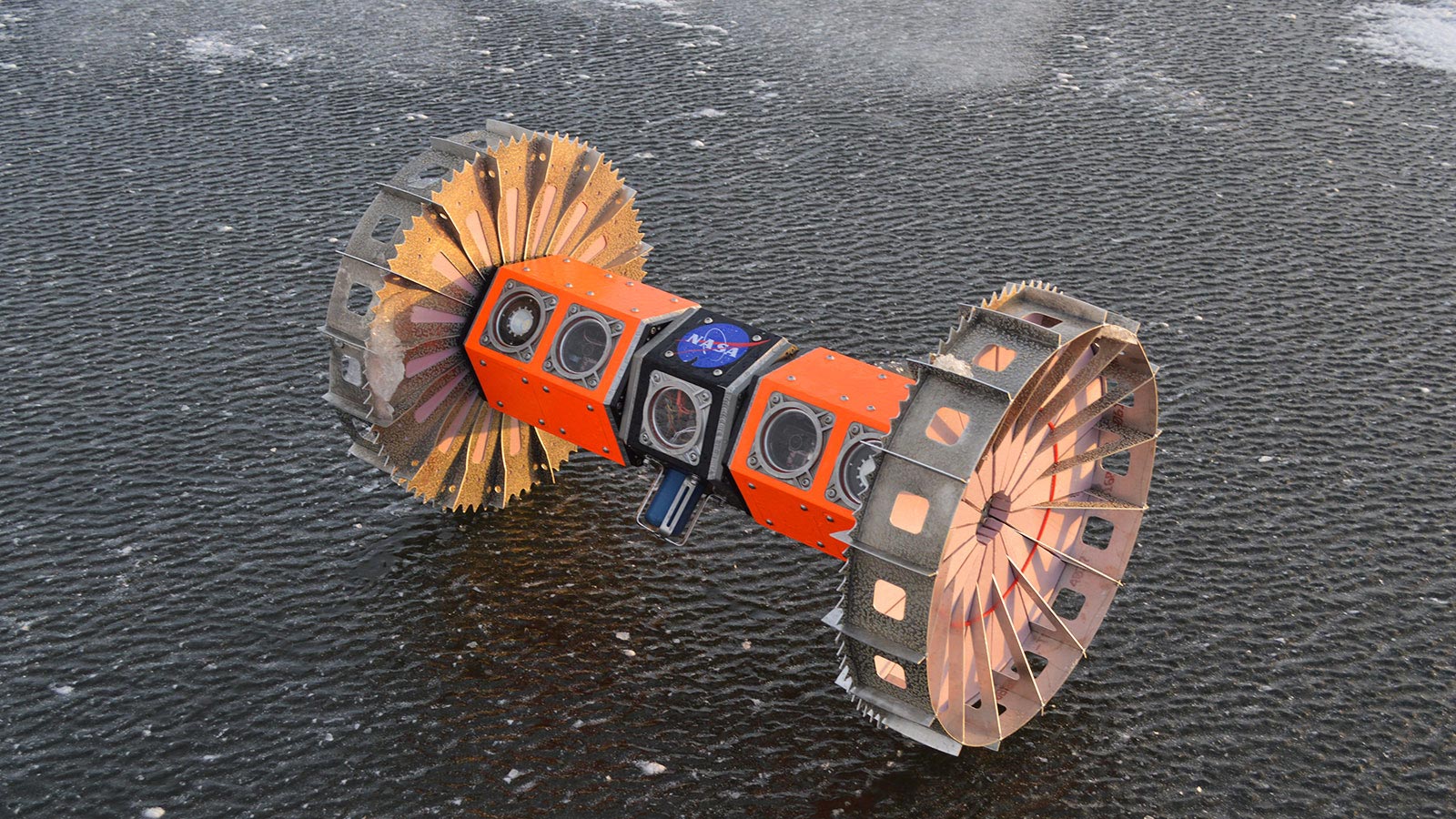
BRUIE, or the Buoyant Rover for Under-Ice Exploration, is being developed for underwater exploration in extraterrestrial, icy waters by engineers at NASA’s Jet Propulsion Laboratory in Pasadena, California. It will spend the next month testing its endurance at Australia’s Casey research station in Antarctica, in preparation for a mission that could one day search for life in ocean worlds beyond Earth.
There are moons throughout the solar system believed to be covered in deep oceans hidden beneath thick, frozen surfaces. Scientists like Kevin Hand, JPL lead scientist on the BRUIE project, believe that these lunar oceans, such as those on Jupiter’s moon Europa and Saturn’s moon Enceladus, may be the best places to look for life in our solar system. But first, they’ll need a tough aquatic explorer capable of navigating solo through an alien ocean locked under ice sheets that could be 6 to 12 miles (10 to 19 kilometers) thick.
“The ice shells covering these distant oceans serve as a window into the oceans below, and the chemistry of the ice could help feed life within those oceans. Here on Earth, the ice covering our polar oceans serves a similar role, and our team is particularly interested in what is happening where the water meets the ice,” said Hand.
The Antarctic waters are the closest Earth analog to the seas of an icy moon, which makes them an ideal testing ground for BRUIE technology. Three feet (1 meter) long and equipped with two wheels to roll along beneath the ice, the buoyant rover can take images and collect data on the important region where water and ice meet, what scientists call the “ice-water interface.”
“We’ve found that life often lives at interfaces, both the sea bottom and the ice-water interface at the top. Most submersibles have a challenging time investigating this area, as ocean currents might cause them to crash, or they would waste too much power maintaining position,” said lead engineer Andy Klesh. “BRUIE, however, uses buoyancy to remain anchored against the ice and is impervious to most currents. In addition, it can safely power down, turning on only when it needs to take a measurement, so that it can spend months observing the under-ice environment.”
During several Antarctic field tests, the rover will remain tethered to the surface as Hand, Klesh, mechanical engineer Dan Berisford and University of Western Australia engineer Dan Arthur test its suite of instruments, including its two live, high-definition cameras.
“BRUIE will carry several science instruments to measure parameters related to life, such as dissolved oxygen, water salinity, pressure and temperature,” said Berisford, who will attach the science instruments if early tests go well. But life on other worlds like Enceladus and Europa may be difficult to measure. “Once we get there,” he added, “we only really know how to detect life similar to that on Earth. So it’s possible that very different microbes might be difficult to recognize.”
While the team has previously tested BRUIE in Alaska and the Arctic, this is the rover’s first trial in Antarctica. Supported by the Australian Antarctic Program, the crew will travel to lakes and the seashore near Casey station, where they will drill holes in the ice in order to submerge BRUIE. The rover could even make some friends — curious penguins and seals sometimes investigate when the science teams drill through the ice.
The team will continue to work on BRUIE until it can survive under the ice for months at a time, remotely navigate without a tether and explore the ocean at greater depths. NASA is already at work constructing the Europa Clipper orbiter, which is scheduled to launch in 2025 to study Jupiter’s moon Europa, laying the groundwork for a future mission that could search for life beneath the ice.
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.