A tiny robot that can travel deep into the lungs to detect and treat the first signs of cancer has been developed by researchers at the University of Leeds.
The ultra-soft tentacle, which measures just 2 millimeters in diameter and is controlled by magnets, can reach some of the smallest bronchial tubes and could transform the treatment of lung cancer.
It paves the way for a more accurate, tailored, and far less invasive approach to treatment and has been developed by engineers, scientists, and clinicians based at the STORM Lab in Leeds.
Demonstration of phantom lung – navigation and localization using magnetic personalized tentacles. Credit: Courtesy of STORM Lab, University of Leeds
Superior Accuracy, Reduced Tissue Damage
The researchers tested the magnetic tentacle robot on the lungs of a cadaver and found that it can travel 37% deeper than the standard equipment and leads to less tissue damage.
The results of their investigations, which were funded by the European Research Council, are published today (July 27) in Nature Engineering Communications.
Professor Pietro Valdastri, Director of the STORM Lab and research supervisor, said: “This is a really exciting development.
“This new approach has the advantage of being specific to the anatomy, softer than the anatomy, and fully-shape controllable via magnetics. These three main features have the potential to revolutionize navigation inside the body.”

Addressing the Lung Cancer Challenge
Lung cancer has the highest worldwide cancer mortality rate. In early-stage non-small cell lung cancer, which accounts for around 84% of cases, surgical intervention is the standard of care. However, this is typically highly invasive and leads to the significant removal of tissue. This approach is not suitable for all patients and can have an impact on lung function.
Lung cancer screening programs have led to better survival rates but have also highlighted the urgent need to find non-invasive ways to diagnose and treat patients early.
The Future of Biopsies and Treatments
As well as improving navigation within the lungs during biopsies, the magnetic tentacle robot could pave the way for far less invasive treatment, allowing clinicians to target only malicious cells while allowing healthy tissue and organs to continue normal function.
The report’s co-author, Dr Giovanni Pittiglio, who carried out the research while conducting his PHD at the University of Leeds’s School of Electronic and Electrical Engineering, added: “Our goal was, and is, to bring curative aid with minimal pain for the patient.
“Remote magnetic actuation enabled us to do this using ultra-soft tentacles which can reach deeper, while shaping to the anatomy and reducing trauma.”
The team will now set about collecting all the data that will allow them to start human trials.

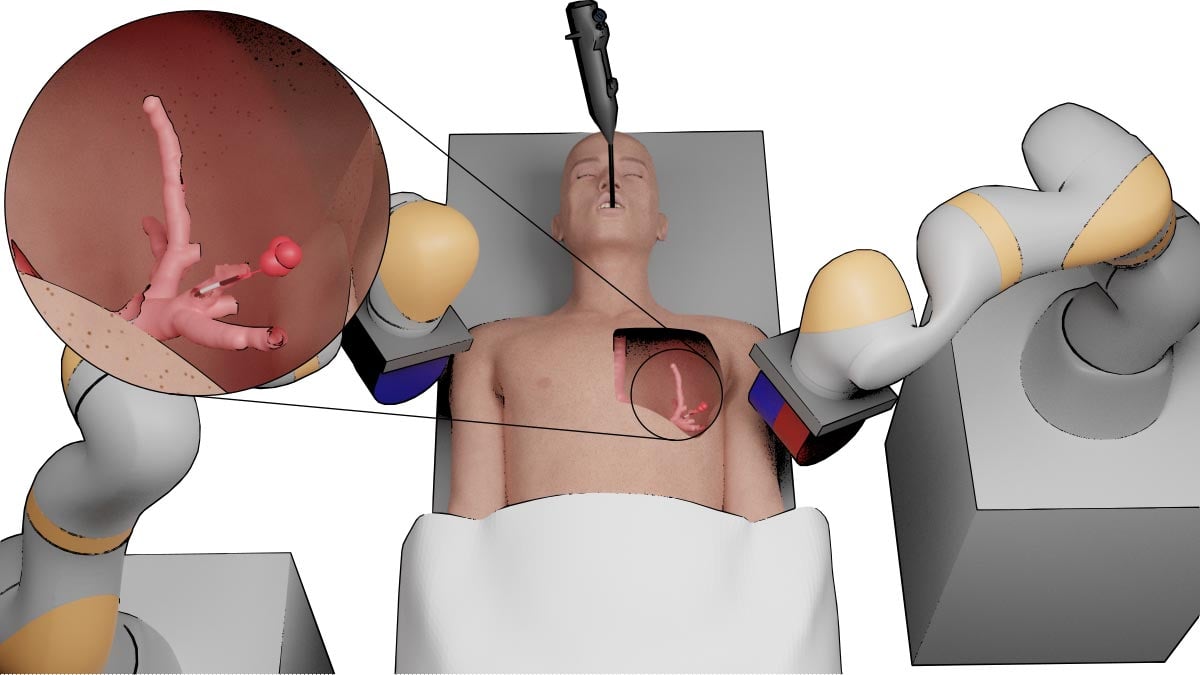
Collaborative Magnetic Tentacle Robots for Brain Surgery
Researchers at the STORM Lab have also been investigating ways of controlling two independent magnetic robots so that they can work together in a confined area of the human anatomy, allowing one to move a camera and the other to control a laser to remove tumors.
The devices are made of silicone to minimize tissue damage and are steered by magnets mounted on robotic arms outside the patient’s body.
Using a replica of a skull, the team successfully trialed the use of two robots to carry out endonasal brain surgery, a technique that allows a surgeon to go through the nose to operate on areas at the front of the brain and the top of the spine.
The researchers needed the magnetic robots to move independently of each other so that one could move the camera, while the other could direct a laser onto a tumor.
Overcoming Magnetic Interference
Normally, two magnets placed closely together would attract each other, creating a challenge for the researchers. They overcame it by designing the bodies of the tentacles in a way that they can bend only in specific directions and by relocating the north and south poles in each magnetic robot tentacle.
They were then able to simulate the removal of a benign tumor on the pituitary gland at the base of the cranium, proving for the first time ever that it is possible to control two of the robots in one confined area of the body.
The findings of their research, which was jointly funded by the European Research Council and the Physical Sciences Research Council, are published today (July 27) in Advanced Intelligent Systems.
The paper’s lead author, Zaneta Koszowska, a researcher at the University of Leeds School of Electronic and Electrical Engineering, said: “This is a significant contribution to the field of magnetically controlled robotics.
“Our findings show that diagnostic procedures with a camera, as well as full surgical procedures, can be performed in small anatomical spaces.”
References:
“Magnetic personalized tentacles for targeted photothermal cancer therapy in peripheral lungs” by Giovanni Pittiglio, James H. Chandler, Tomas da Veiga, Zaneta Koszowska, Michael Brockdorff, Peter Lloyd, Katie L. Barry, Russell A. Harris, James McLaughlan, Cecilia Pompili and Pietro Valdastri, 27 July 2023, Engineering Communications.
DOI: 10.1038/s44172-023-00098-9
“Independently Actuated Soft Magnetic Manipulators for 2 Bimanual Operations in Confined Anatomical Cavities” by Zaneta Koszowska, Michael Brockdorff, Tomas da Veiga, Giovanni Pittiglio, Peter Lloyd, Thomas Khan-White, Russell A. Harris, James W. Moor, James H. Chandler and Pietro Valdastri, 27 July 2023, Advanced Intelligent Systems.
DOI: 10.1002/aisy.202300062
Funding: Engineering and Physical Sciences Research Council and HORIZON EUROPE European Research Council
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.