
New model provides clues into how whisker bending translates to sensory touch signals.
We know your cat’s whiskers are handsome — but you can’t even see the cool part.
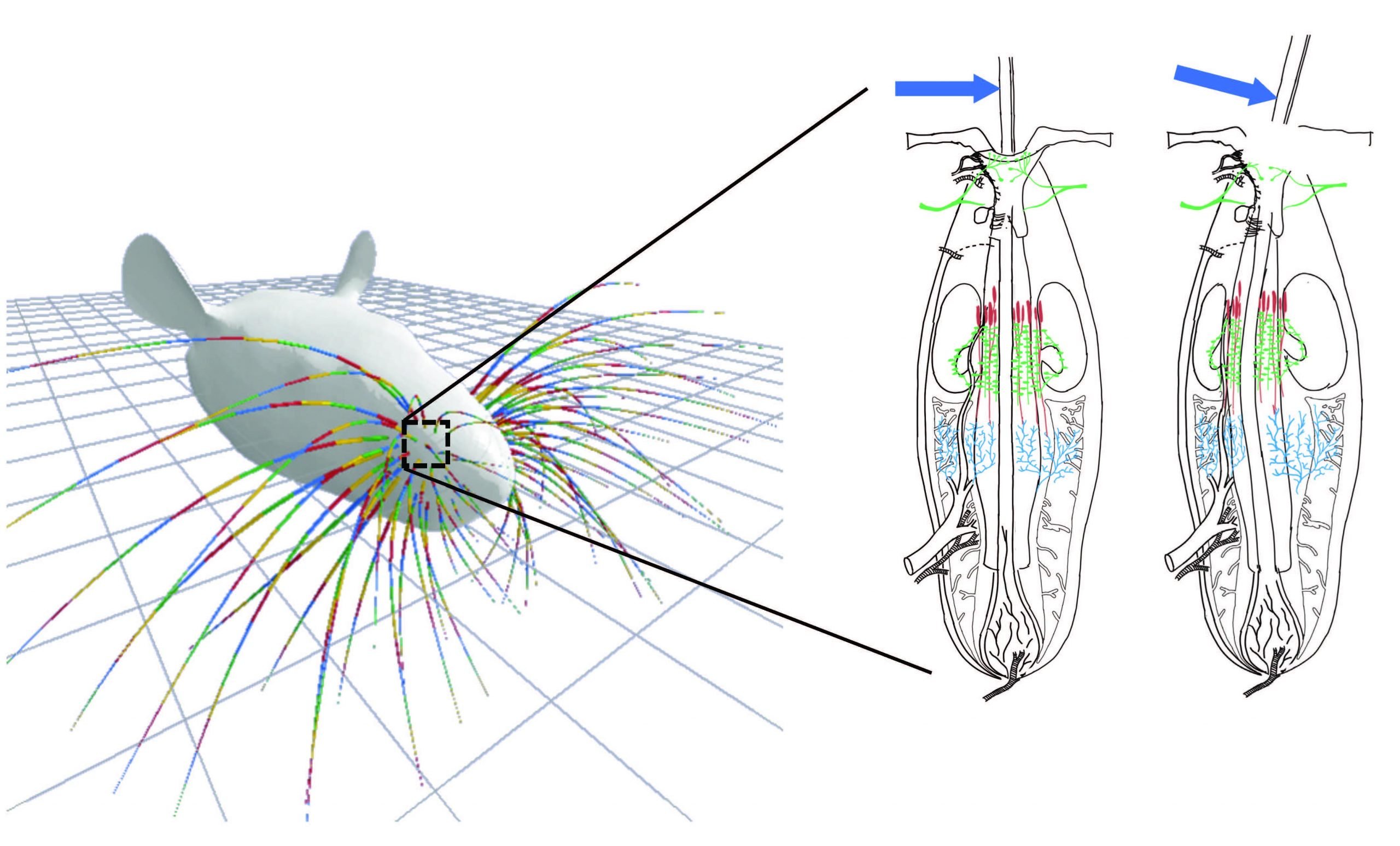
The base of the whisker, which is responsible for sending touch signals to the brain, is hidden inside the follicle, a deep pocket that embeds the whisker within the skin. Because this section of the whisker is obscured, understanding precisely how whiskers communicate touch to the brain has been a longstanding mystery.
In a new study, an interdisciplinary team of researchers at Northwestern University has developed the first mechanical simulation of the whisker inside the follicle. By combining their new model with new anatomical observations, the researchers discovered that when whiskers touch an object, they form an “S”-shaped bend within the follicle. By bending into this “S” shape, the whisker pushes or pulls on sensor cells, which then send touch signals to the brain.
The research was published on April 1, 2021, in the journal PLoS Computational Biology.
The findings could help researchers predict how whiskers activate different sensory cells to influence which signals are sent to the brain as well as help better understand human touch.
“The part of the whisker that triggers touch sensors is hidden inside the follicle, so it’s incredibly difficult to study,” said Northwestern’s Mitra Hartmann, senior author of the study. “You can’t measure this process experimentally because if you slice open the follicle, then the damage would change the way the whisker is held. By developing new simulations, we can gain insights into biological processes that cannot be directly measured experimentally.”
Hartmann is a professor of biomedical and medical engineering at Northwestern’s McCormick School of Engineering, where she is a member of the Center for Robotics and Biosystems. The paper’s first author is Yifu Luo, a Ph.D. student in Hartmann’s laboratory. Coauthors include Northwestern professor John Rudnicki and Chris Bresee, a former Northwestern Ph.D. student who is now a postdoctoral researcher at the University of California, Davis.
Whiskers Work Like Flexible Sensors
Most mammals use whiskers to explore their environments with the sense of touch. Similar to human hairs, whiskers do not have sensors along their length. Instead, all of their sensors are at the base in the follicle. When an external force bends a whisker, that deformation extends along the whisker into the follicle, triggering sensor cells.
“By developing new simulations, we can gain insights into biological processes that cannot be directly measured experimentally.”
Mitra Hartmann, Biomedical and mechanical engineer
Few previous studies have examined how whiskers deform within follicles in order to make contact with the sensor cells. Exploring this process required a highly interdisciplinary team: Bresee, who earned a Ph.D. from the Northwestern University Interdepartmental Neuroscience program, performed a novel anatomical analysis to help constrain mechanical quantities, and Rudnicki, a professor of civil and environmental engineering in McCormick, used his expertise in continuum mechanics to help develop the mechanical model.
“For this research, our team needed mechanical engineers, a neuroscientist and a civil engineer,” Hartmann said. “We really couldn’t have done this work with any other team.”
Applying Earth Science to Biology
To help the collaboration, Rudnicki contributed his knowledge of beam theory, which is commonly used to analyze geological issues, such as the bending of sediment layers and tectonic plates. In the new study, the team applied beam theory to whiskers. Instead of analyzing how tectonic plates might bend in a subduction zone, for example, the researchers analyzed how the whisker might interact with the follicle to stimulate sensor cells.
“A whisker is just a deformable beam interacting with springs,” Rudnicki said. “But constrained by an experiment and informed by anatomical observations, the theory predicts how the whisker might bend within the follicle. Depending on the form of this bending, it will activate different mechanoreceptors within the follicle.”
In addition to finding a signature “S”-shaped bend, the Northwestern team determined this bending profile is likely similar regardless of whether an animal actively touches an object with its whiskers or is passively touched by something external.
“Our model demonstrates consistency in the whisker deformation profile between passive touch and active whisking,” Luo said. “In other words, the same group of sensory cells will respond when the whisker is deflected in the same direction under both conditions. This result suggests that some types of experiments to study active whisking can be done in an anesthetized animal.”
Although the model is based on experimental data collected from rats, Hartmann believes their findings will likely apply to all mammals. And beyond learning more about our furry friends, this work also could provide new insights into the human sense of touch.
“The sense of touch is incredibly important to nearly everything we do in the world, yet it is very difficult to study touch using hands,” Hartmann said. “Whiskers provide a simplified model to understand the complex, mysterious nature of touch.”
Reference: “Constraints on the deformation of the vibrissa within the follicle” by Yifu Luo, Chris S. Bresee, John W. Rudnicki and Mitra J. Z. Hartmann, 1 April 2021, PLOS Computational Biology.
DOI: 10.1371/journal.pcbi.1007887
The study was supported by the National Institutes of Health (award number R01-NS093585).
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.