
Mars’ rocks sparked visions of multi-layered cakes, but the real treat was Curiosity’s successful deployment of APXS on a challenging target.
Alongside detailed imaging campaigns, a new software upgrade gave Curiosity smarter autonomy to choose its next ChemCam target.
Sweet Layers of Science: Chocolate and Curiosity
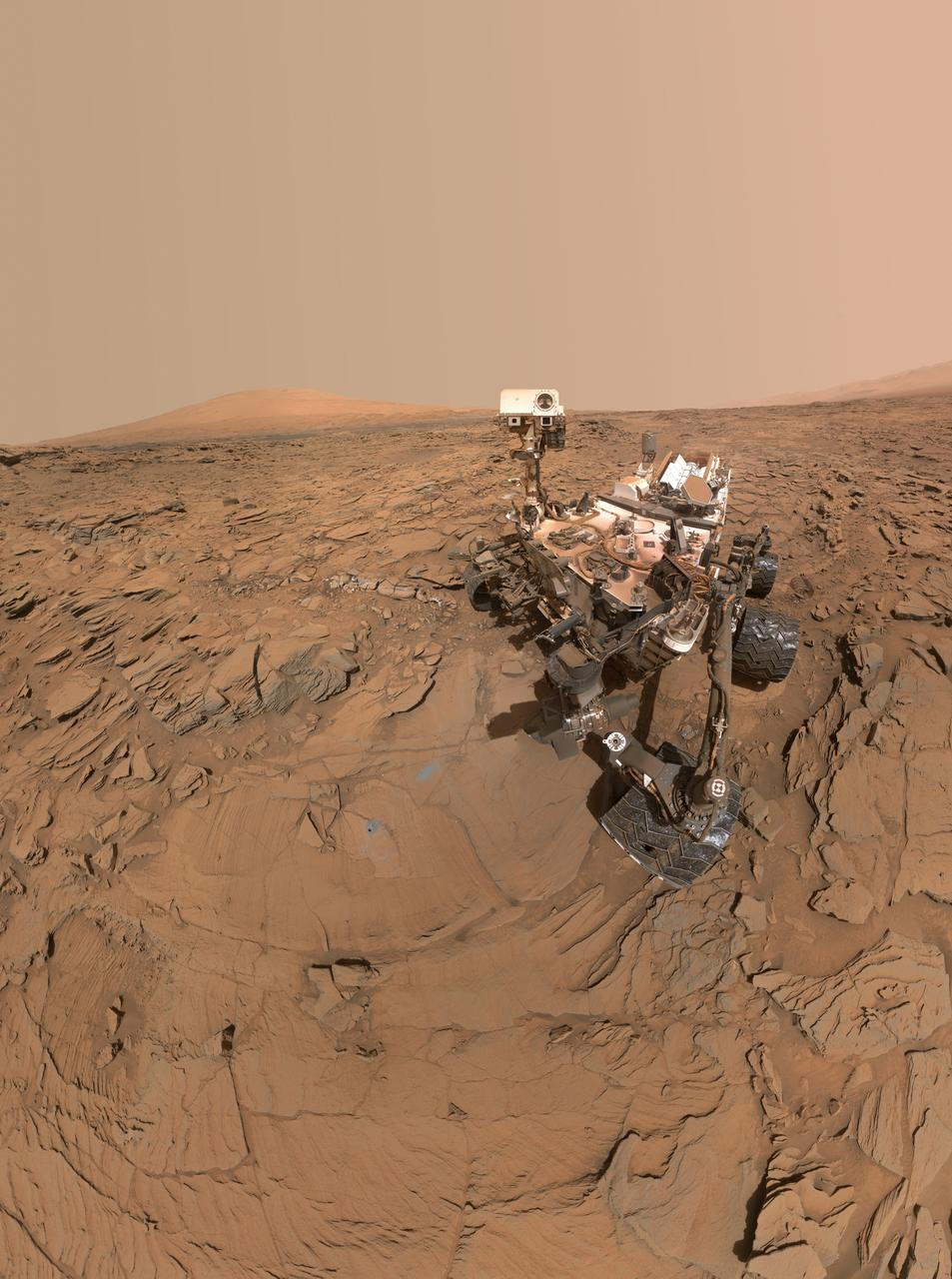
I will start this blog with an apology, an apology because I suspect, by the end of this post, you, the reader, may have a craving for chocolate, or cake, or both. While we saw hints of it in the previous workspace, as captured by Susanne’s article, today’s workspace featured prominent laminations throughout Curiosity’s sightlines, which presented the science team with the challenge of finding a safe place to utilize APXS (and MAHLI). Perhaps it was because of Easter last weekend, perhaps I needed an early lunch — whatever the cause, I could not shake the visual parallels between the rocks in our workspace, as captured in this blog’s image, and a many-layered cake such as a Prinzregententorte.
Target Acquired: APXS Locks Onto a “Cakey” Rock
The rover planners rose to the technical challenge, as they always do, and were ultimately able to find a safe area to place APXS on the top of the rock that is prominent just above and left of the center of today’s image. Combined with a green-light from SRAP, Curiosity now had its (cakey) target and could APXS it too.
Tosol’s APXS and MAHLI target, “Hale Telescope,” is named after the famous landmark located north-northwest of San Diego, California. I, for one, was not familiar with the history of this landmark, including how groundbreaking it was at the time of its development and commissioning through the 1920s, ‘30s, and ‘40s.
Imaging Adventures: From Puerto Suelo to Fan Palm
Curiosity’s plan tosol started with APXS and MAHLI of Hale Telescope. These activities were complemented by Mastcam images of “Puerto Suelo” and “Potrero Seco,” as well as long-distance imaging by ChemCam of “Torote Bowl,” nearly 1 kilometer (about 0.6 miles) away. Curiosity also imaged and conducted compositional analyses of the layered target “Fan Palm,” slightly offset from Hale Telescope, with LIBS. Our intrepid rover then completed a drive of about 23 meters (about 75 feet) in preparation for the three-sol weekend plan.
A Smarter Rover: Upgraded Autonomy with AEGIS
On the second sol of the current plan, Curiosity acquired Navcam images and a suprahorizon movie. The highlight of the second sol, however, arguably was an upgraded version of the AEGIS (Autonomous Exploration for Gathering Increased Science) activity where the rover will autonomously determine its own target to analyze with ChemCam while awaiting further instructions from Earth. The software upgrade will allow Curiosity’s team to know what target the rover chose to observe in time for us to make the weekend plan, even though the observation itself won’t happen on Mars until later.
Final Thoughts: Stories (and Chocolate) Written in Stone
Mars continues to offer stories written in stone, and like all good stories, the richness lies in the voices layered within. Or chocolate. The data aren’t down yet.
Written by Scott VanBommel, Planetary Scientist at Washington University
Curiosity is NASA’s pioneering Mars rover, launched on November 26, 2011, and landing successfully inside Gale Crater on August 6, 2012. Its mission: to determine if Mars ever had the conditions to support microbial life.
Armed with a powerful mobile science lab, Curiosity analyzes rocks, soil, and the atmosphere, searching for chemical ingredients essential to life. Its landmark discoveries include evidence of ancient riverbeds, organic molecules, and past habitable environments. Curiosity also studies the current Martian climate and radiation levels to help prepare for future human exploration.
Known for its robust design and longevity, Curiosity has dramatically expanded our understanding of Mars — and it’s still going strong over a decade later.
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.