SPARROW, a steam-powered robotic concept, could one day take giant leaps over some of the most hazardous terrains known (and unknown) in the solar system.
Steam locomotion may sound like an antiquated way to get around, but it might be getting a science fiction makeover as we expand our reach into the solar system.
A novel robotic concept being investigated at NASA’s Jet Propulsion Laboratory in Southern California would use steam propulsion to hop across the sort of icy terrains found on Jupiter’s moon Europa and Saturn’s moon Enceladus. Both are thought to host vast subsurface oceans of salty water under a thick ice crust. But while that makes them fascinating destinations for scientific study, the little we know about their surfaces could also make navigating them especially challenging.
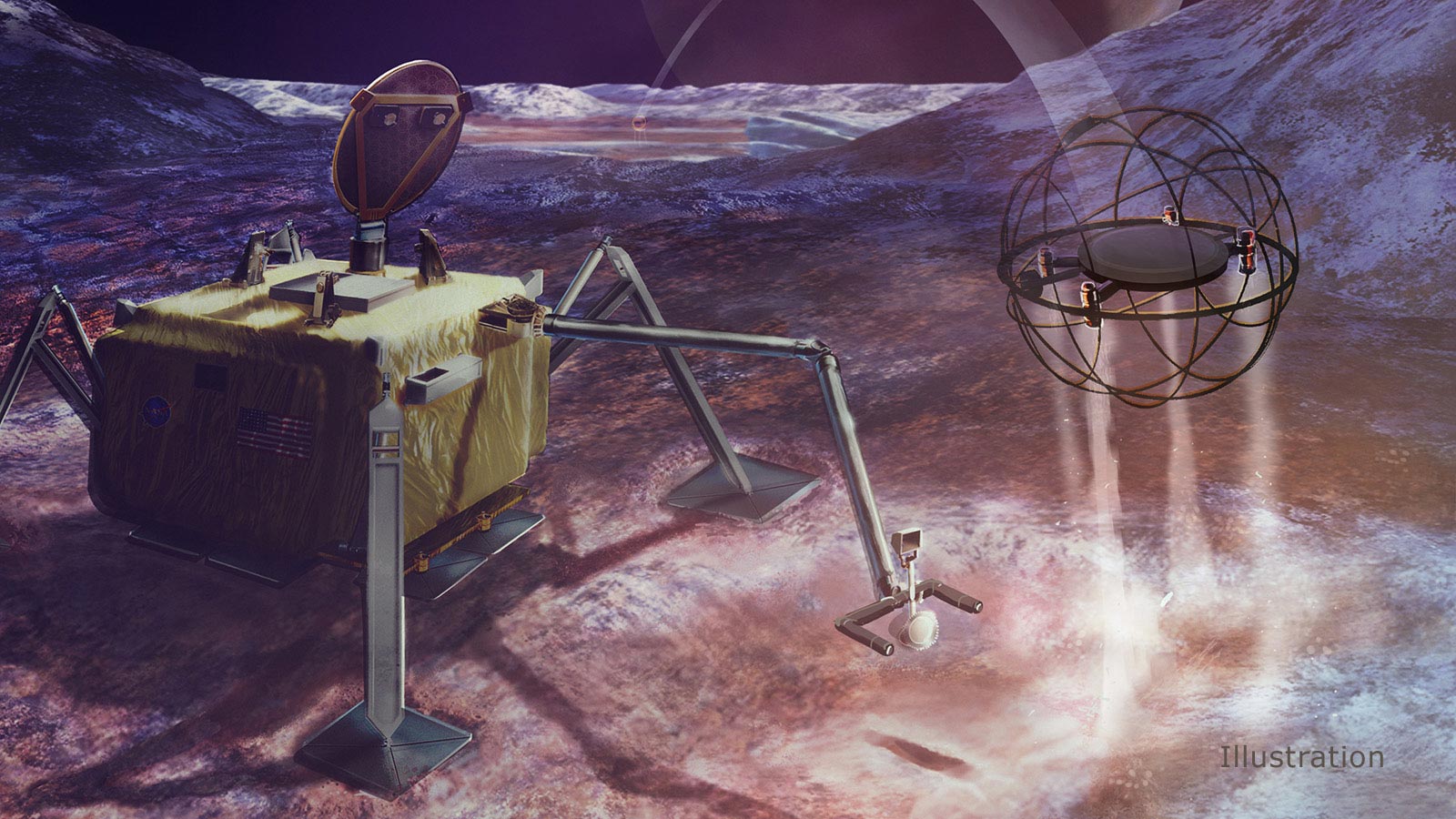
That’s where the Steam Propelled Autonomous Retrieval Robot for Ocean Worlds, or SPARROW, comes in. About the size of a soccer ball, the robot consists of a system of thrusters, avionics, and instruments encased in a protective spherical cage. To keep the environment pristine for study, SPARROW would run not on rocket fuel but on steam produced from melted ice, traveling primarily through the air via short thrusts. In the sort of low-gravity environment found on those distant icy moons, there’d be no atmospheric drag to slow it down, enabling hops of many miles over landscapes that other robots would have difficulty navigating.
NASA is researching a hopping robot that can easily navigate the harsh glacier-like terrain on icy worlds in our solar system. And that’s just the tip of the iceberg. NASA 360 takes a look at the NASA Innovative Advanced Concept (NIAC) called S.P.A.R.R.O.W., a revolutionary approach to exploring frozen ocean worlds. Credit: NASA 360
“The terrain on Europa is likely highly complex,” said Gareth Meirion-Griffith, JPL roboticist and the lead researcher of the concept. “It could be porous, it might be riddled with crevasses, there might be meters-high penitentes” — long blades of ice known to form at high latitudes on Earth — “that would stop most robots in their tracks. But SPARROW has total terrain agnosticism; it has complete freedom to travel across an otherwise inhospitable terrain.”
The concept depends on a lander serving as the home base for SPARROW. It would mine the ice and melt it down before loading the water onto the hopping robot. SPARROW would then heat the water inside its engines, creating bursts of steam to give a boost off the surface. When low on fuel, the hopping bot would return to the lander for more, also dropping off any scientific samples for further analysis.
To maximize the science investigations that could be done, many SPARROWs could be sent together, swarming around a specific location or splitting up to explore as much alien terrain as possible.
In 2018, SPARROW was awarded Phase I funding by the NASA Innovative Advanced Concepts (NIAC) program, which nurtures visionary ideas that could, someday, be used in future space missions. Phase I studies explore the overall viability and advance the Technology Readiness Level (TRL). Eligible recipients of Phase I awards can propose a follow-on Phase II study.
For SPARROW, the NIAC Phase I funding allowed the development and testing of different water-based propellant systems that could be used to produce steam in the most efficient way. Additionally, the SPARROW team was able to better understand how the spherical robot might tumble when landing on chaotic icy terrain by using computer simulations, thereby identifying the most efficient angle of launch and speed of hop.
“From this, and related propulsion calculations, we were able to determine that a single long hop would be more efficient than several smaller hops,” added Meirion-Griffith.
NIAC is funded by NASA’s Space Technology Mission Directorate, which is responsible for developing the new cross-cutting technologies and capabilities needed by the agency.
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.