
First-of-its-kind mechanical model simulates bending of mammalian whiskers.
Researchers have developed a new mechanical model that simulates how whiskers bend within a follicle in response to an external force, paving the way toward better understanding of how whiskers contribute to mammals’ sense of touch. Yifu Luo and Mitra Hartmann of Northwestern University and colleagues present these findings in the open-access journal PLOS Computational Biology.
With the exception of some primates, most mammals use whiskers to explore their environment through the sense of touch. Whiskers have no sensors along their length, but when an external force bends a whisker, that deformation extends into the follicle at the base of the whisker, where the whisker pushes or pulls on sensor cells, triggering touch signals in the nervous system.
Few previous studies have examined how whiskers deform within follicles in order to impinge on the sensor cells–mechanoreceptors–inside. To better understand this process, Luo and colleagues drew on data from experimental studies of whisker follicles to create the first mechanical model capable of simulating whisker deformation within follicles.
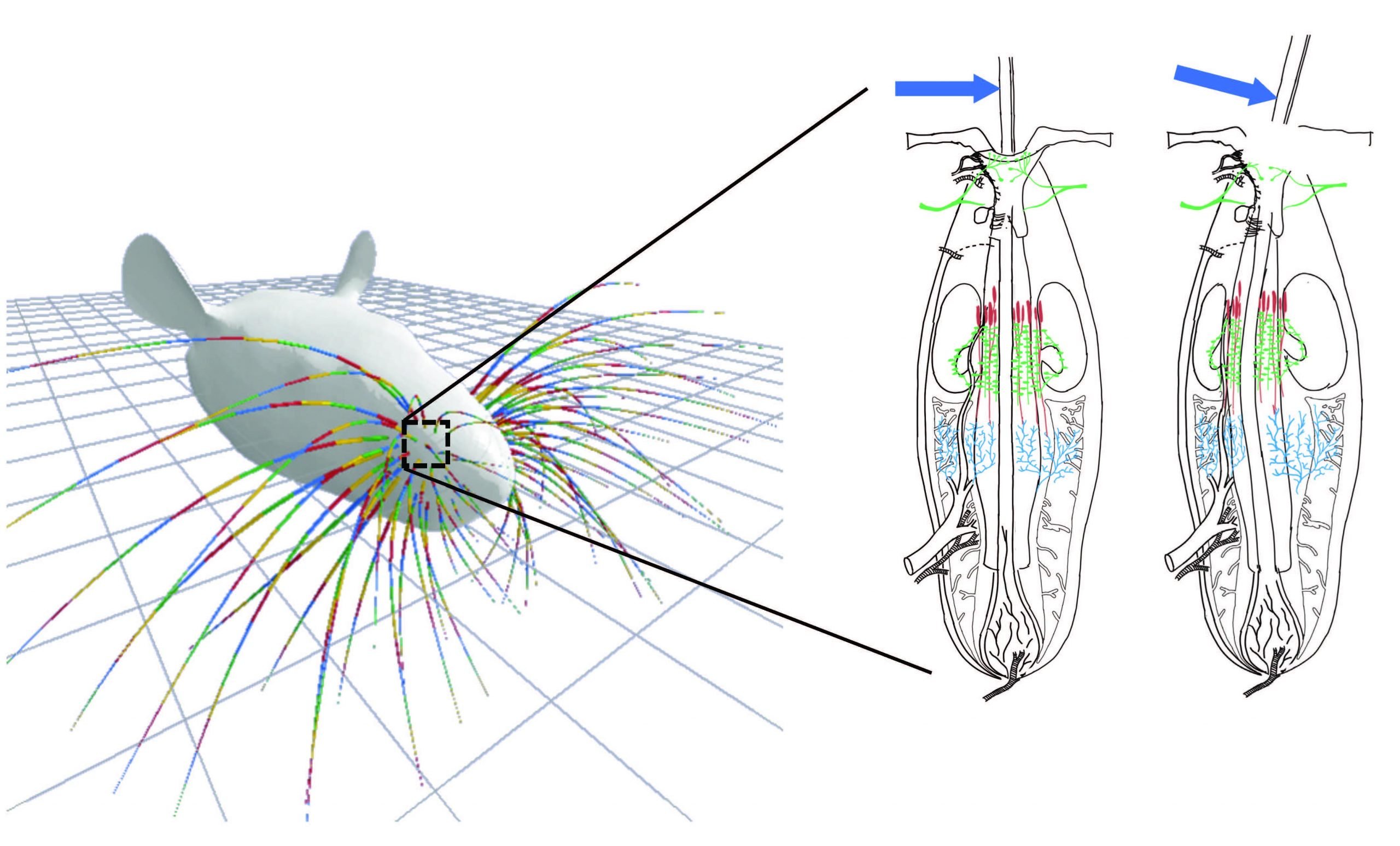
The simulations suggest that whisker deformation within follicles most likely occurs in an “S” shape, although future experimental data may show that the deformation is “C” shaped. The researchers demonstrate that these shape estimates can be used to predict how whiskers push and pull on different kinds of mechanoreceptors located in different parts of the follicle, influencing touch signals sent to the brain.
Modeling Passive and Active Touch
The new model applies to both passive touch and active “whisking,” when an animal uses muscles to move its whiskers. The simulations suggest that, during active whisking, the tactile sensitivity of the whisker system is enhanced by increased blood pressure in the follicle and by increased stiffness of follicular muscle and tissue structures.
“It is exciting to use simulations, constrained by anatomical observations, to gain insights into biological processes that cannot be directly measured experimentally,” Hartmann says. “The work also underscores just how important mechanics are to understanding the sensory signals that the brain has evolved to process.”
Future research will be needed to refine the model, both computationally and by incorporating new experimental data.
Read Whisker Simulation Gives New Insight Into Mammals’ Mysterious Sense of Touch for more on this research.
Reference: “Constraints on the deformation of the vibrissa within the follicle” by Yifu Luo, Chris S. Bresee, John W. Rudnicki and Mitra J. Z. Hartmann, 1 April 2021, PLOS Computational Biology.
DOI: 10.1371/journal.pcbi.1007887
Funding: This work was supported by NIH award R01-NS093585 to MJZH. The funders had no role in study design, data collection and analysis, decision to publish, or preparation of the manuscript.
Never miss a breakthrough: Join the SciTechDaily newsletter.
Follow us on Google and Google News.